Liebe Modding Gemeinde!
Wir nähern uns den letzten Updates.
Da der Fertigstellungstermin immer Näher rückt habe ich die Worklogs etwas vernachlässigt, sorry.
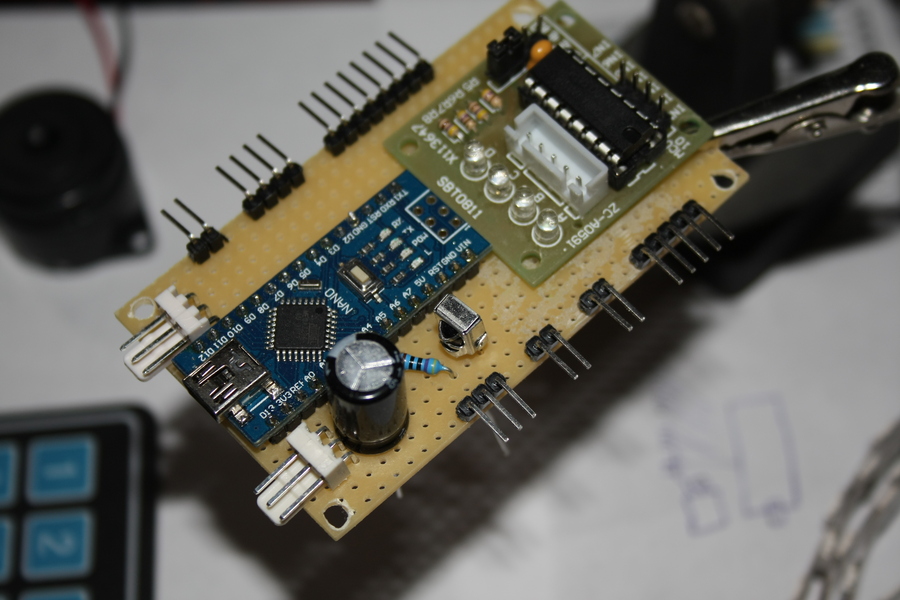
Also ich fasse nochmal den ganzen Aufbau des Arduinos zusammen.
Folgende Komponenten werden verbaut, von oben links angefangen, so wie man schreibt.

Stepper Motor 28BYJ-48
Driver ULN2003
Schallsensor HC SR04
90db Buzzer
Keypad
Arduino Nano
Infrarot Empfänger
kondensator 1000 microfarad
Wiederstaand 470 Ohm
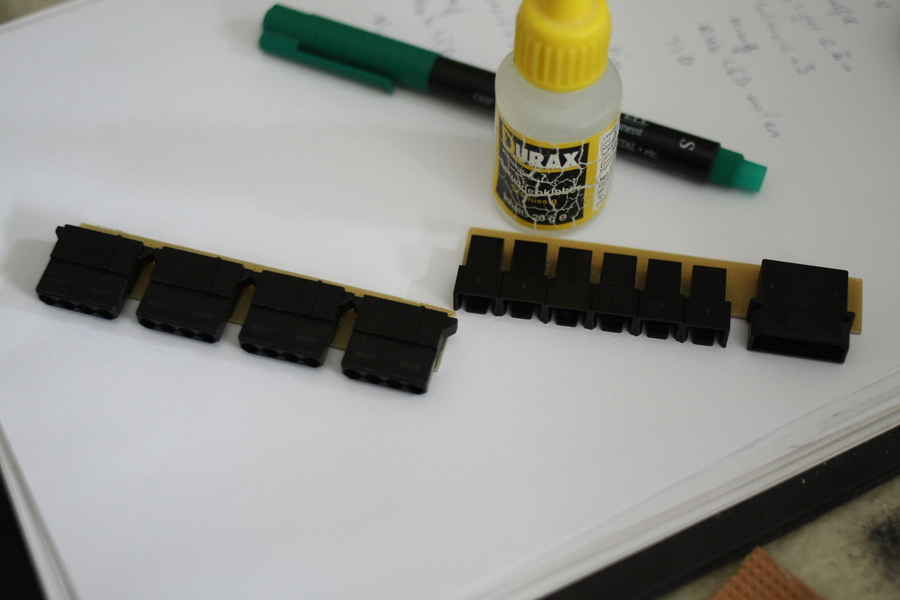
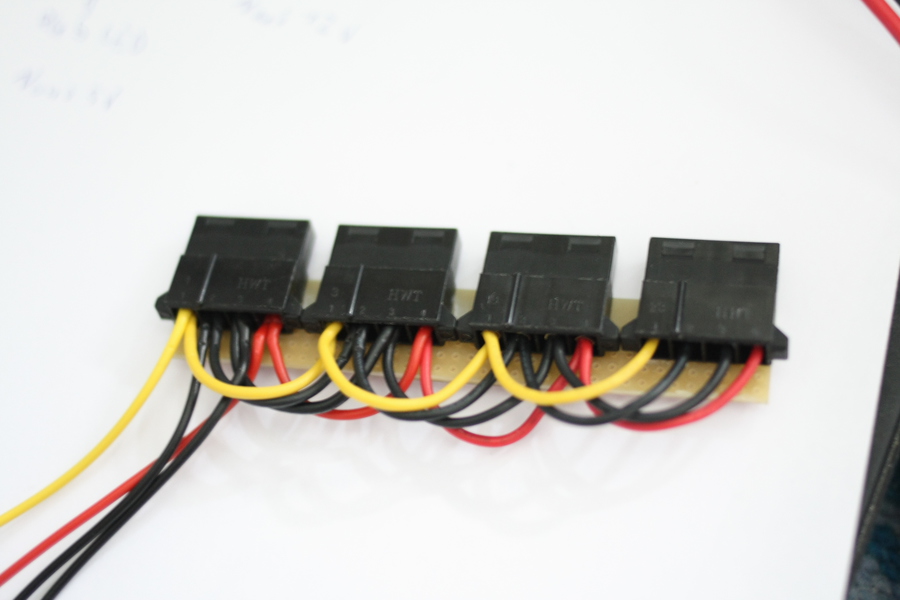
div. Pins Connectors
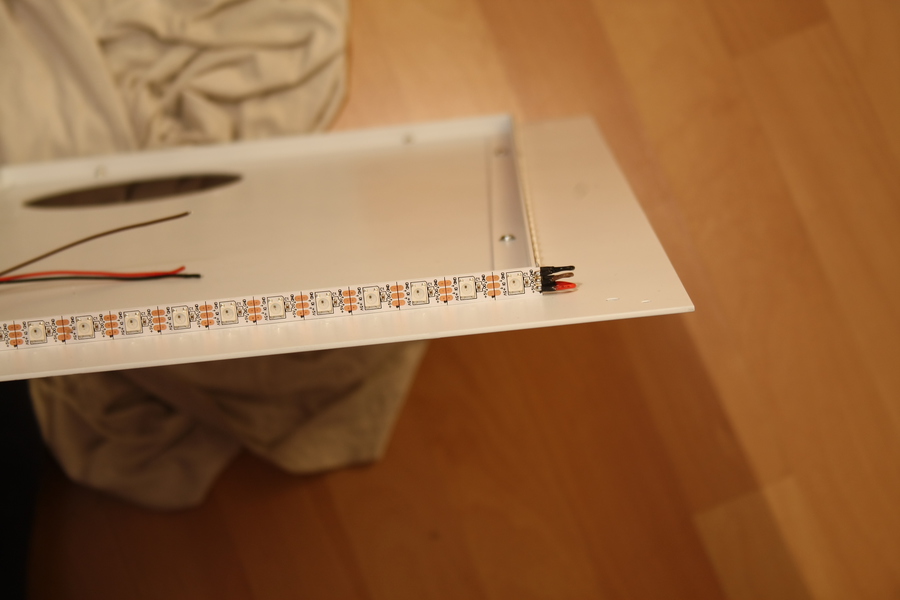
Digitale RGB LED Strip WS2812B
Fernbedienung
Was Macht es?
-Der Motor öffnet und schließt die Schiebetür im Sockel.
Lässt sich Wahlweise durch die Fernbedienung oder das Keypad öffnen schließen.
LED´s in der Bodenplatte signalisieren Orangenes Lichtsignal(blinkend)
-Der Schallsensor deckt das ganze Window ab und gibt Alarm sobald das Window berührt wird.
LED´s in der Bodenplatte leuchten Rot, Buzzer ertönt
-Der PC wird sich über das Keypad Starten und Reseten lassen
- über das Keypad und die Fernbedienung lassen sich verschieden programmierte Lichtspiele starten
Der Arduino ist somit komplett belegt. ;-)
Im Februar habe ich einen kleinen Crashkurs im Arduino programmieren belegt und benutze nun folgenden Sketch, welchen ich teils selbst geschrieben bzw. meinen Bedürfnissen angepasst habe.
CODE:
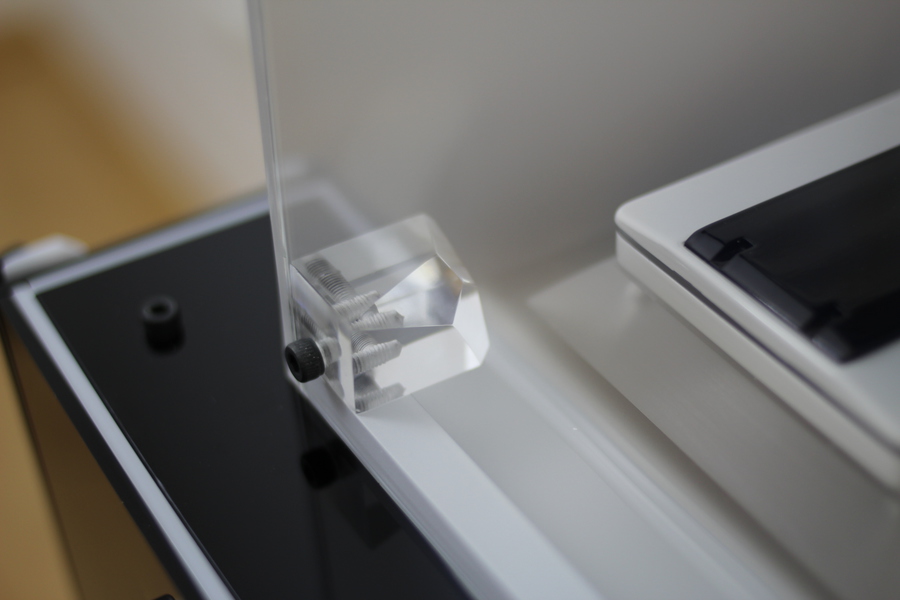
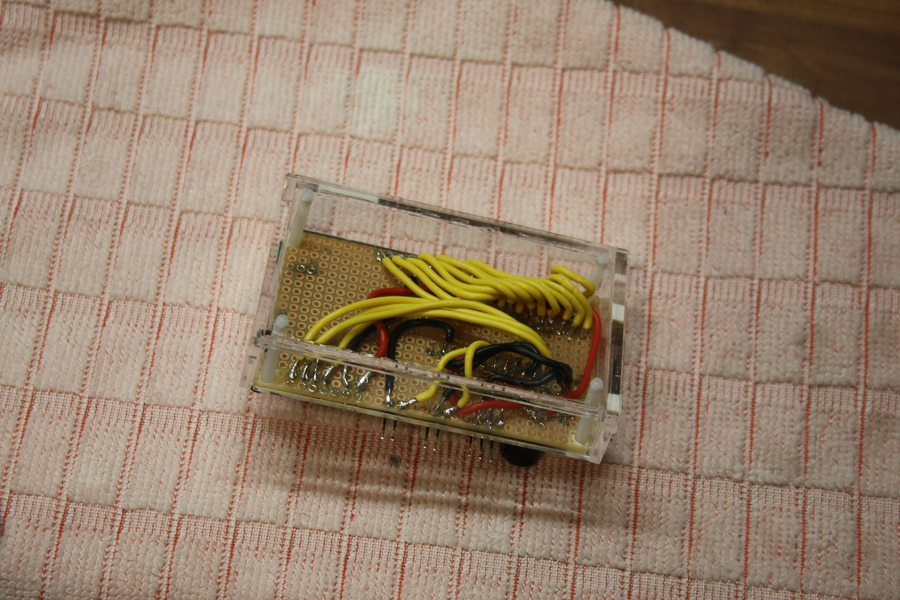
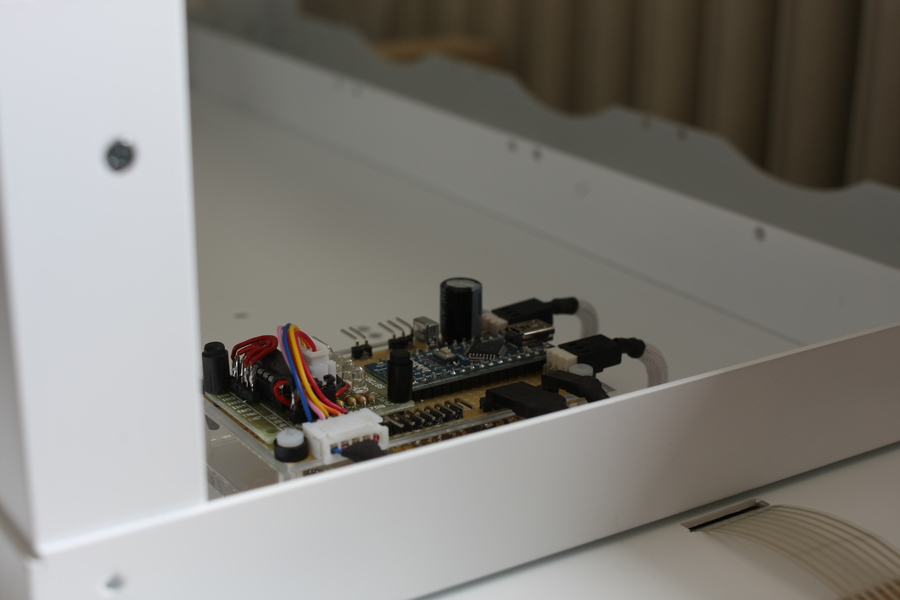
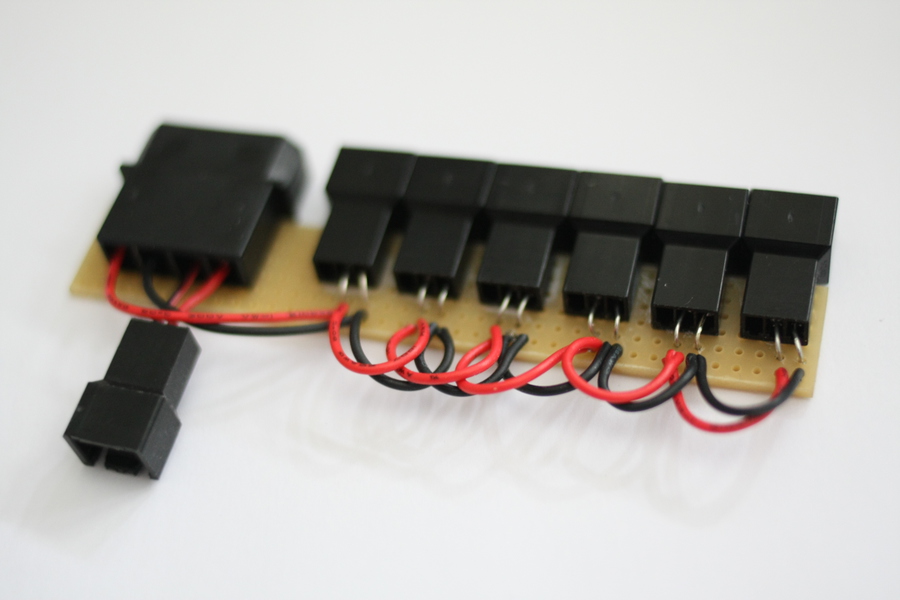
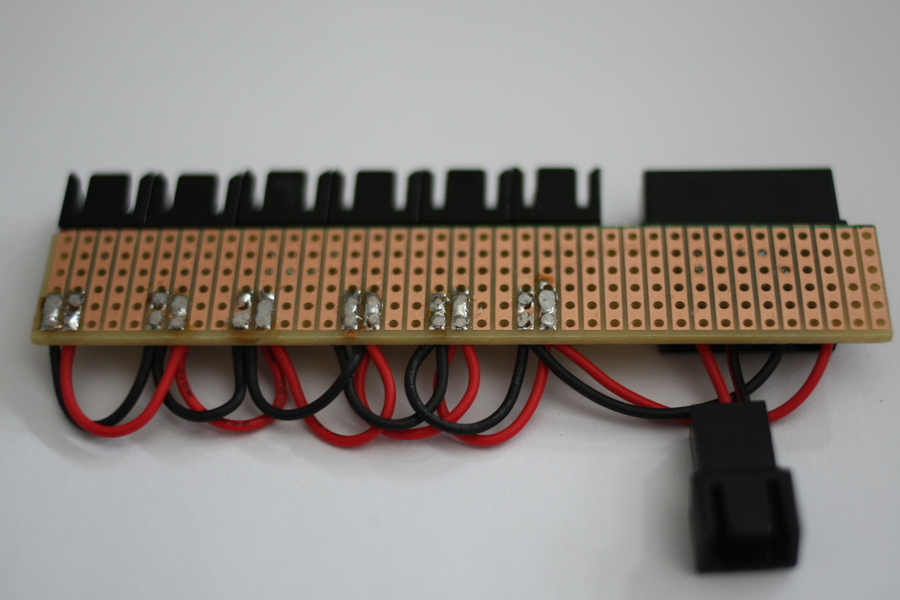
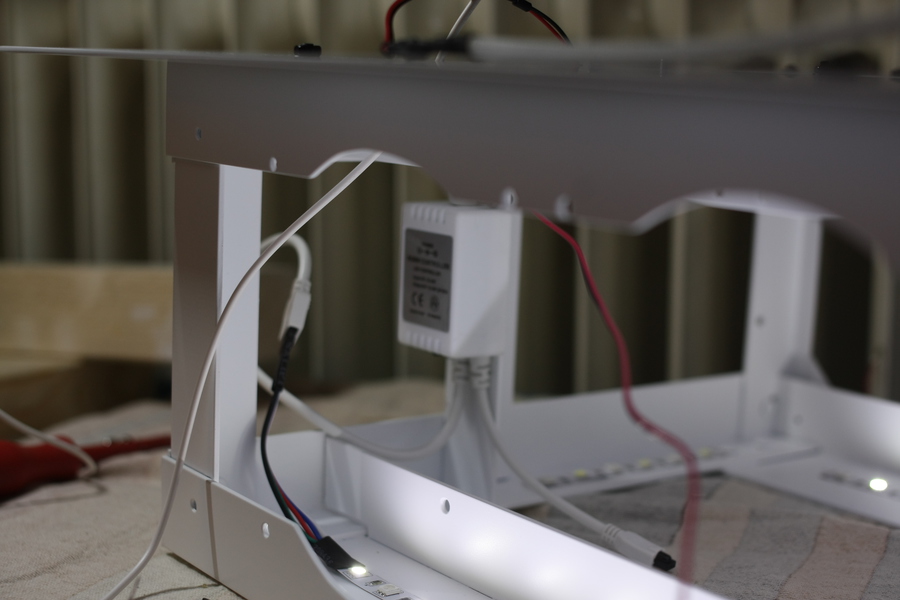
In dieser Anordnung habe ich dann alles verlötet
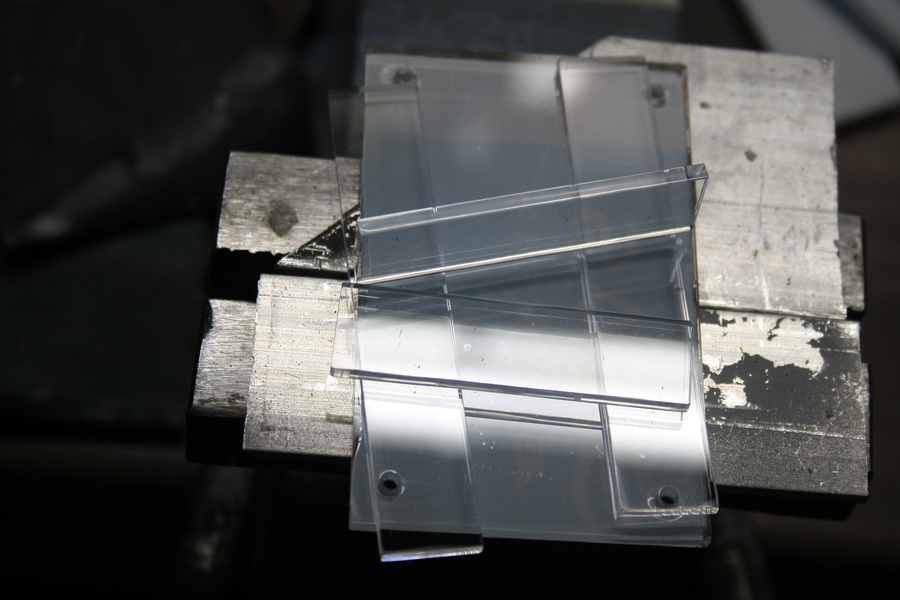
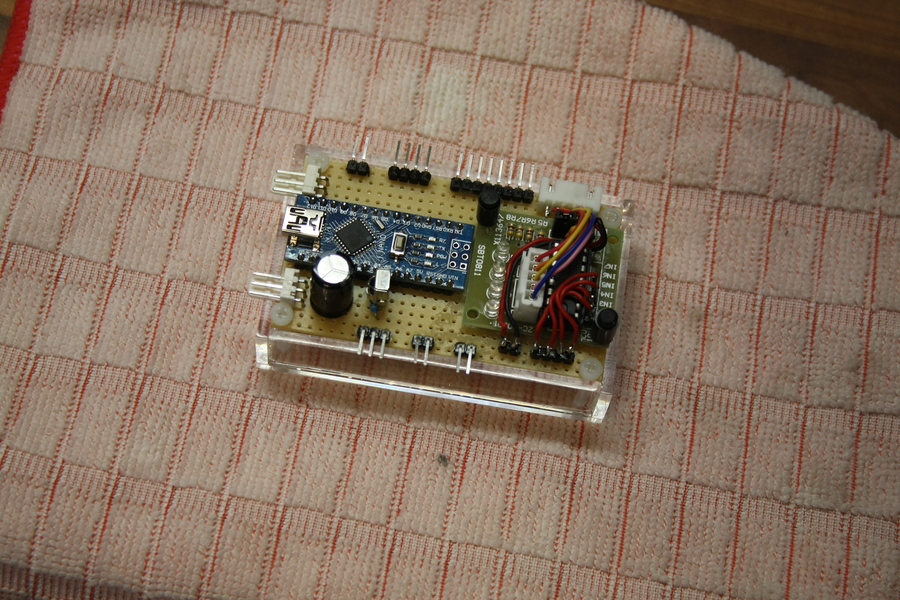
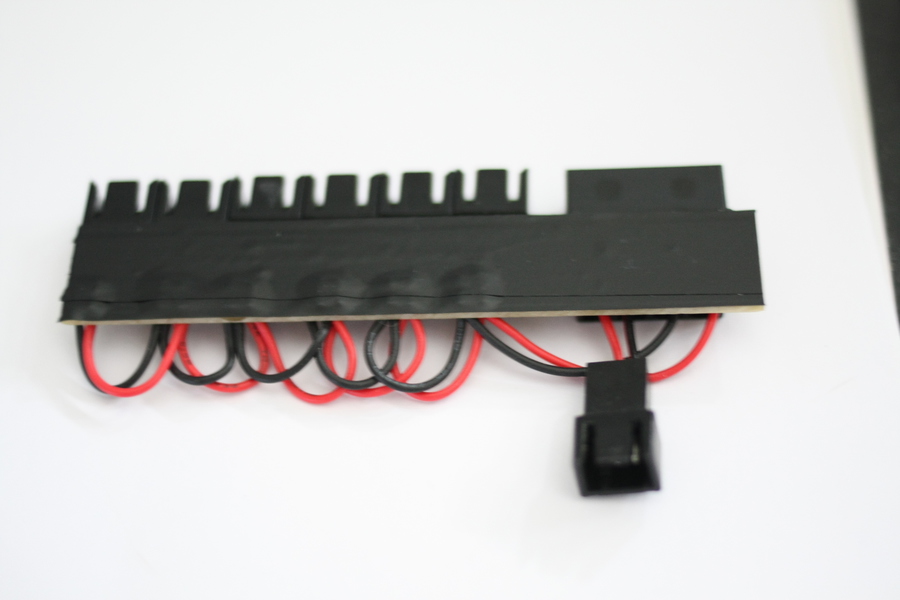
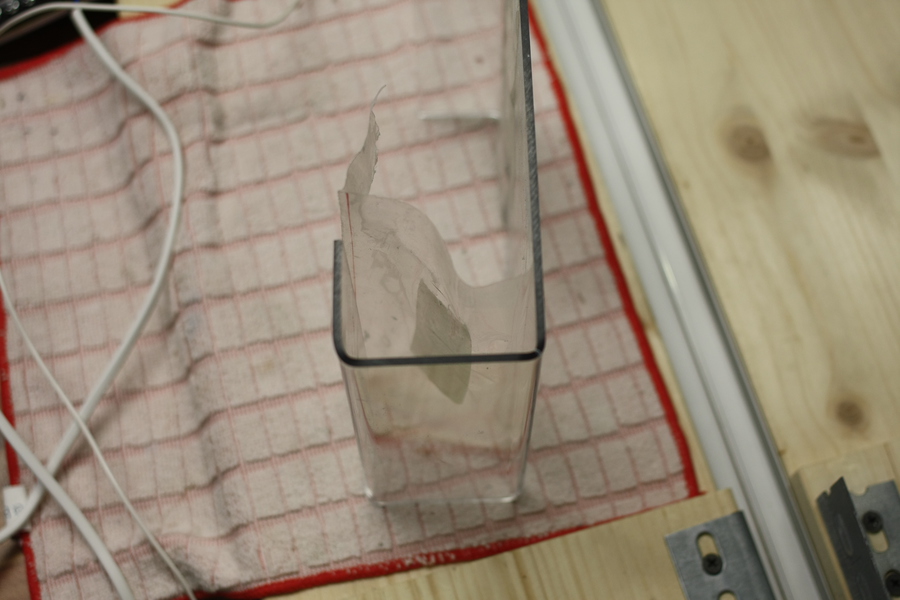
Als Halterung eine kleine Glasbox zurecht geschnitten und verklebt

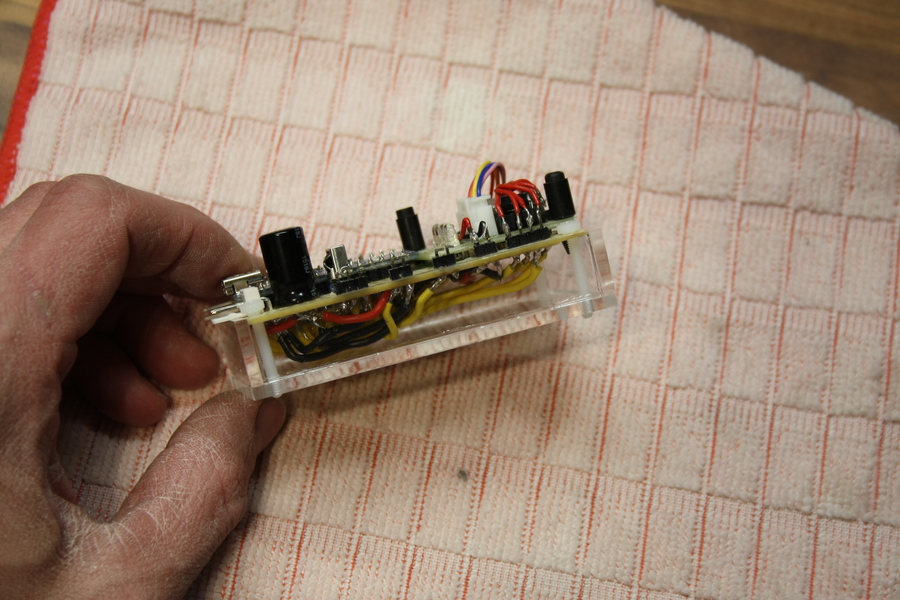
und darauf den Arduino verschraubt
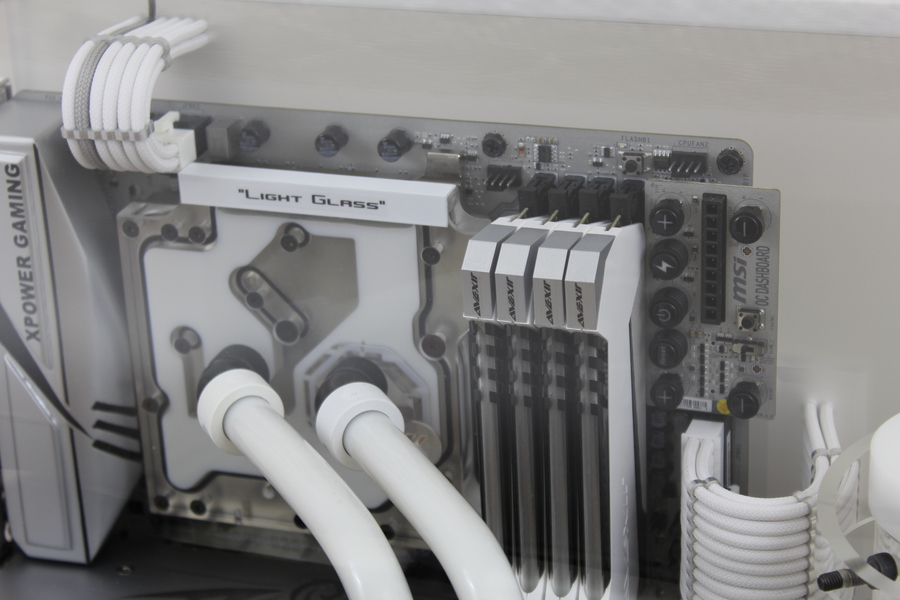
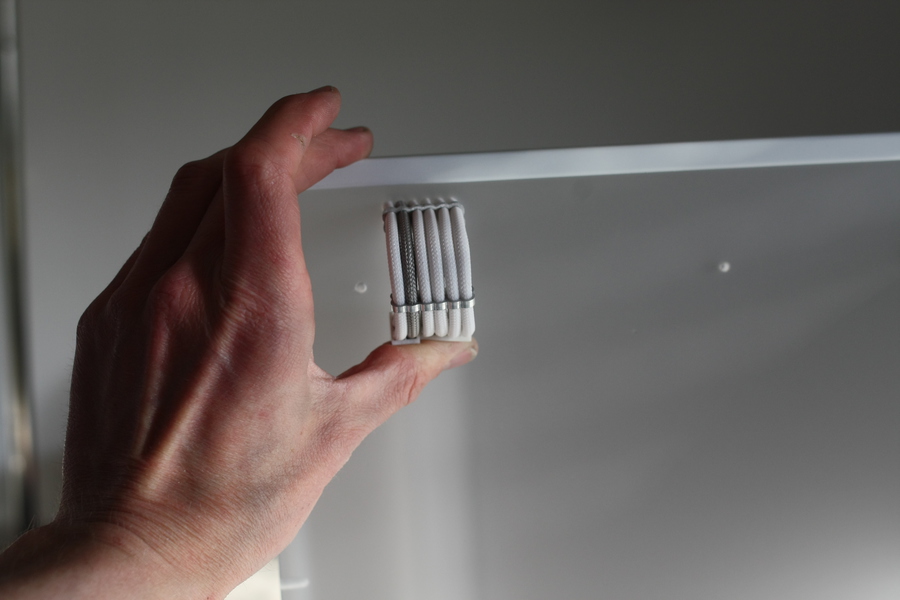
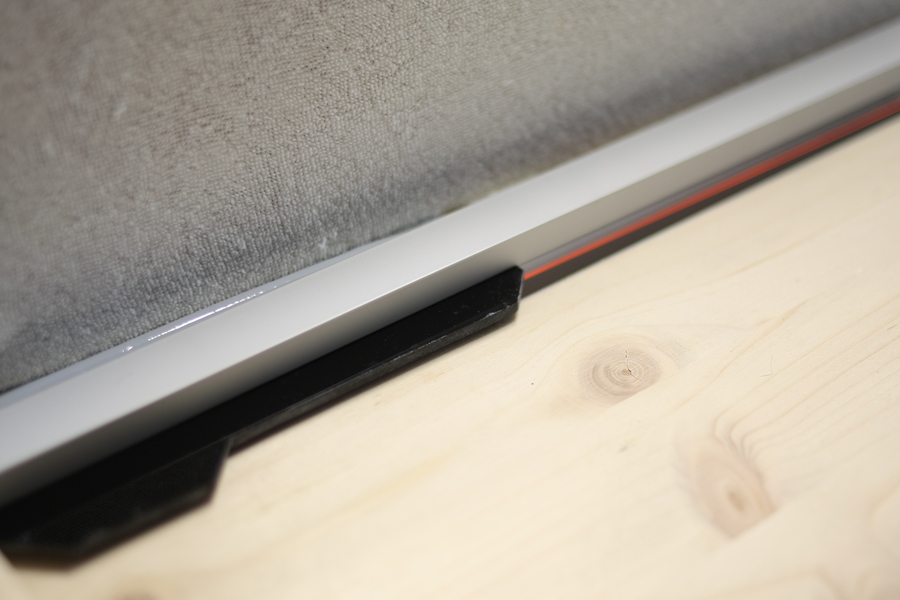
Nun habe ich die Avexir Raiden noch farblich angepasst, die kleinen Endkappen wurden im Ton lackiert

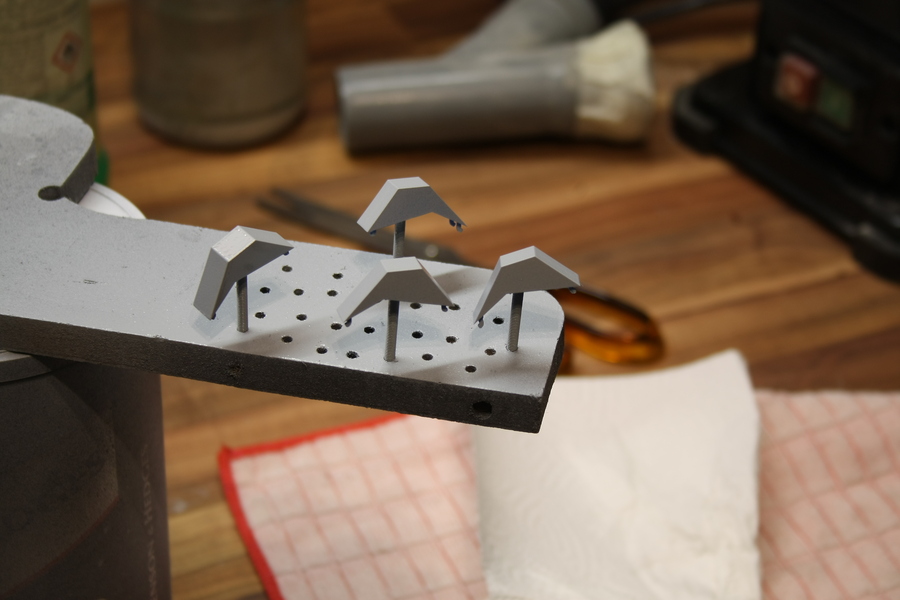
und die Seiten mit Folie bezogen, eine Lackierung war hier zu riskant wergen Farbe abplatzen oder hinterlaufen
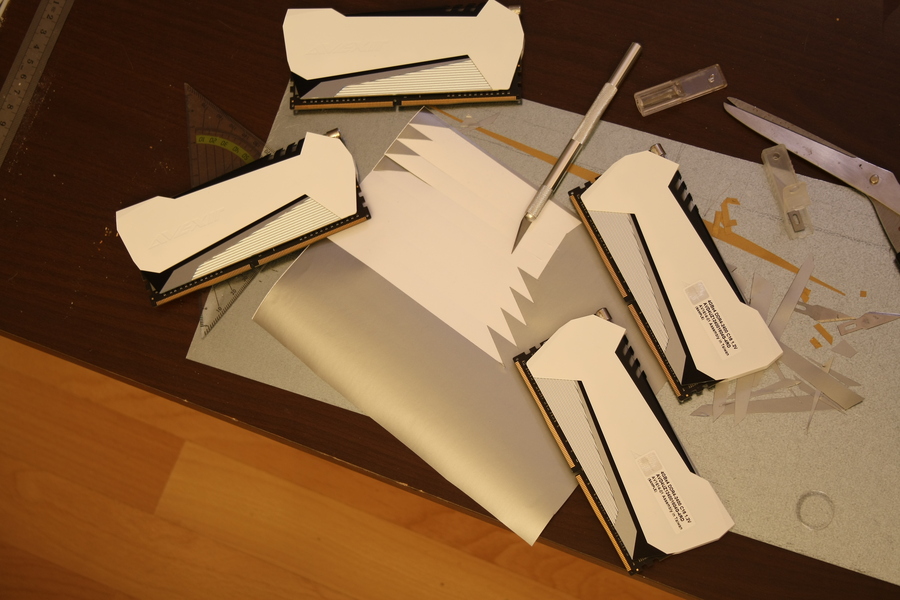
und so sehen sie nun aus

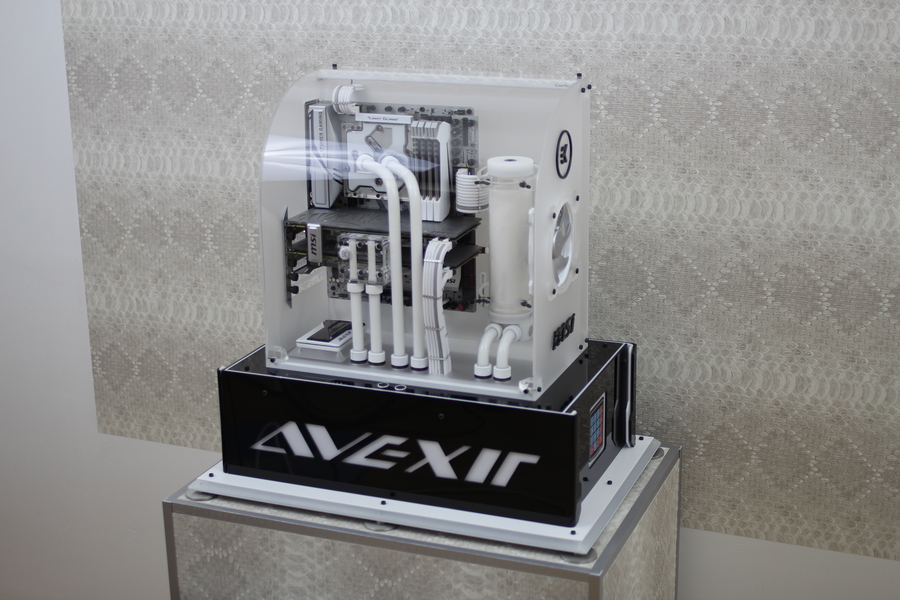
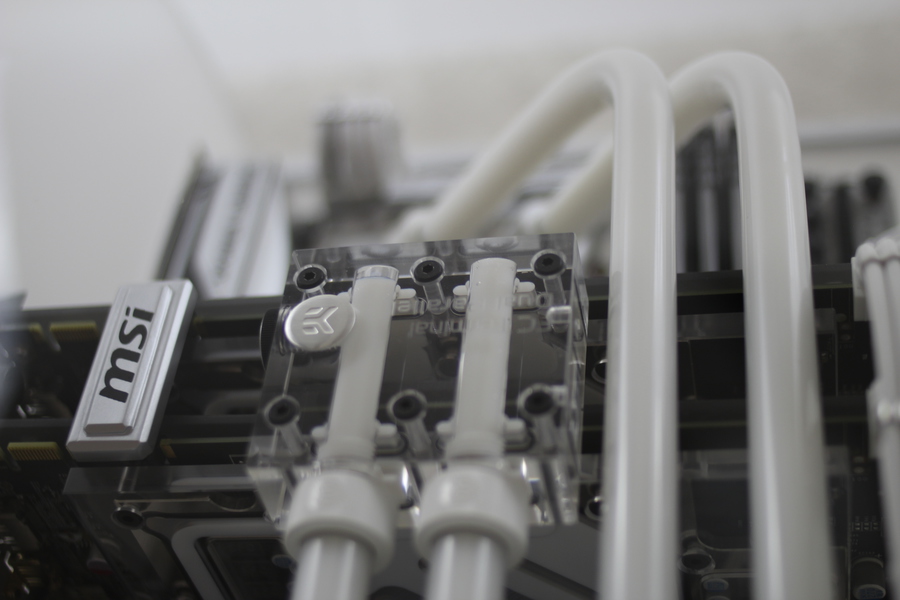
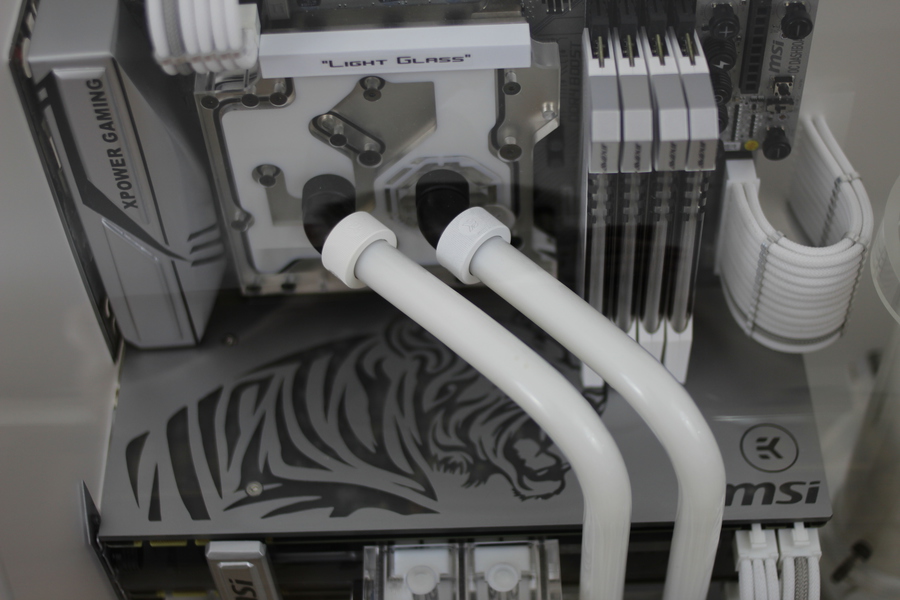
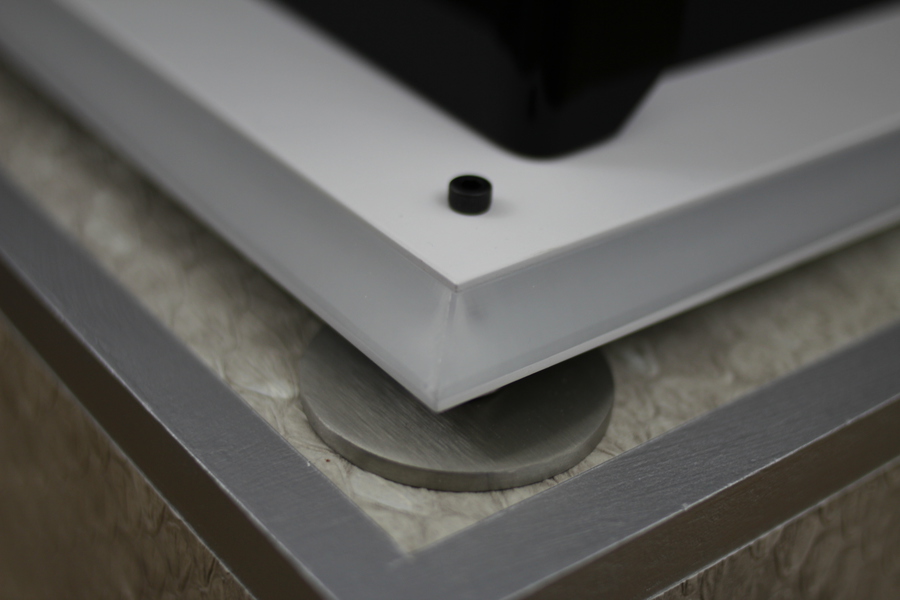
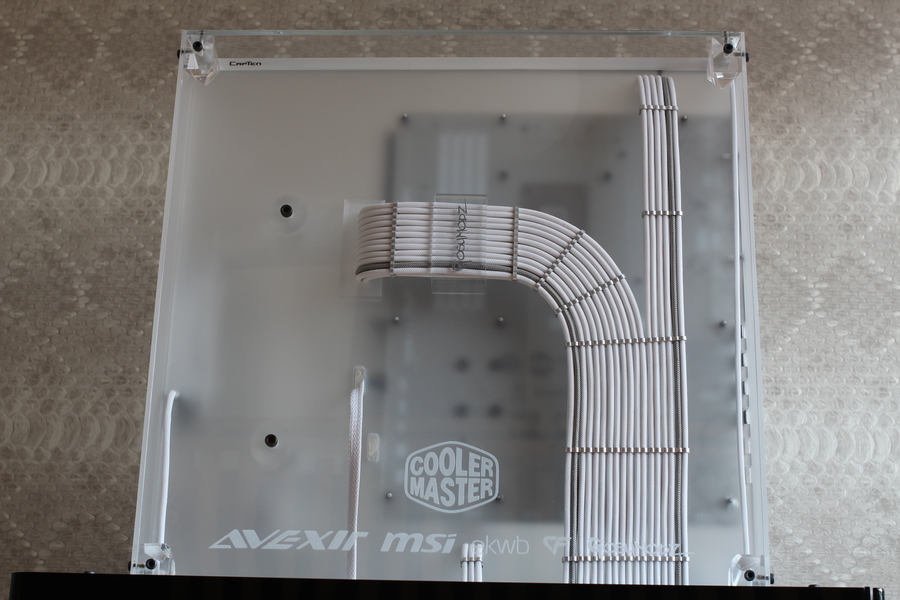
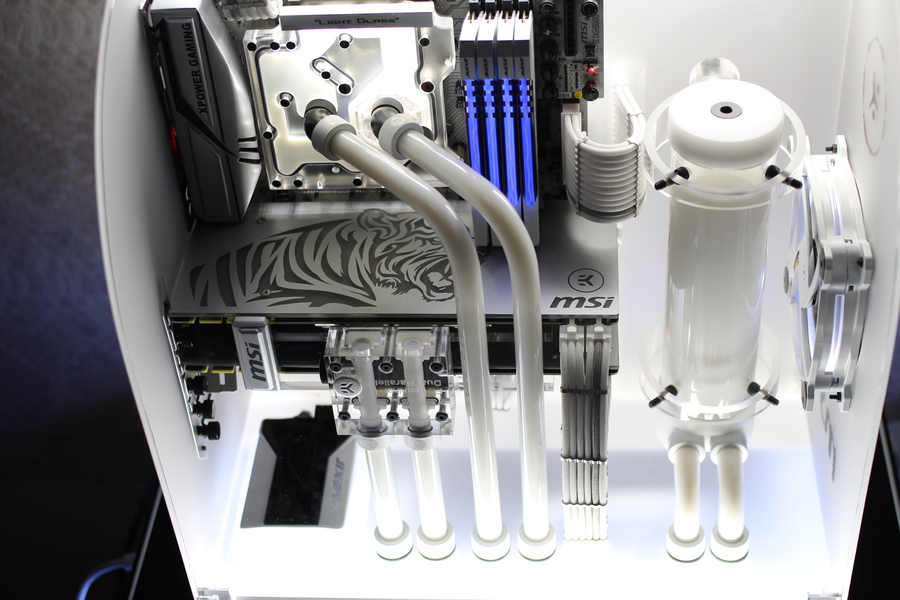
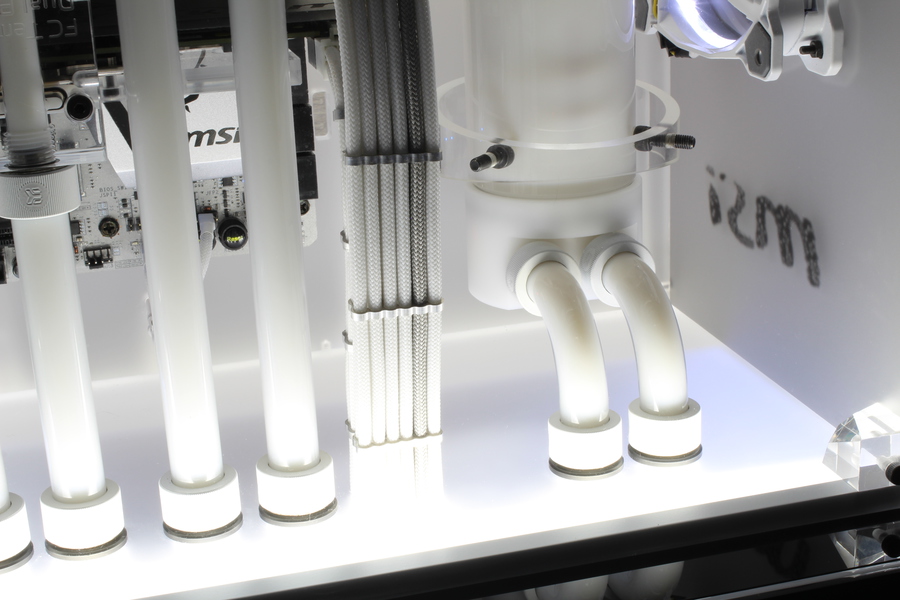
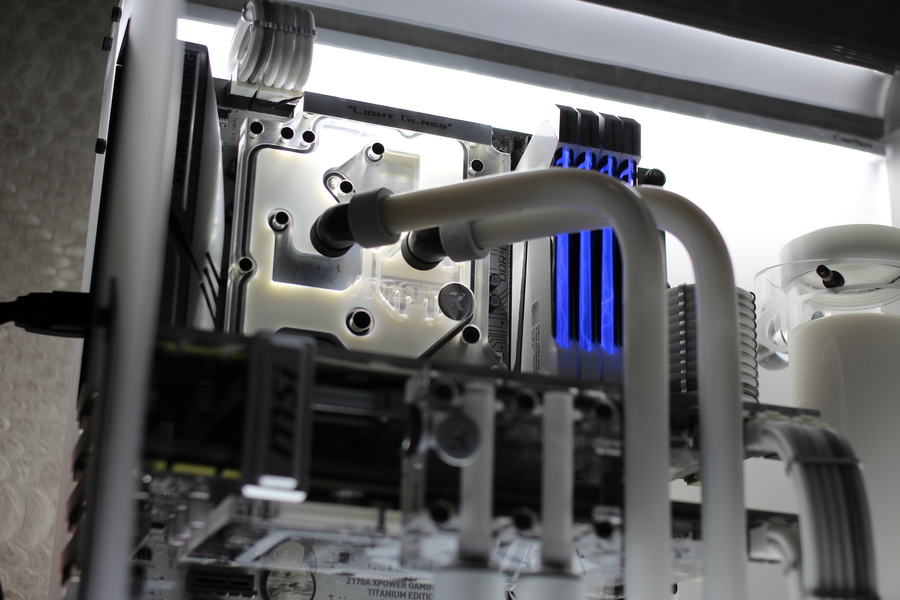
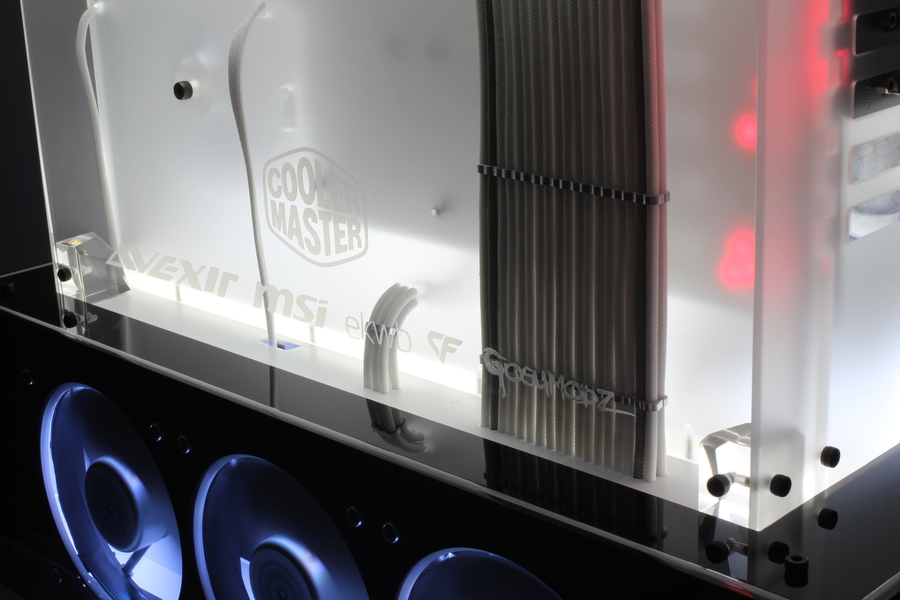
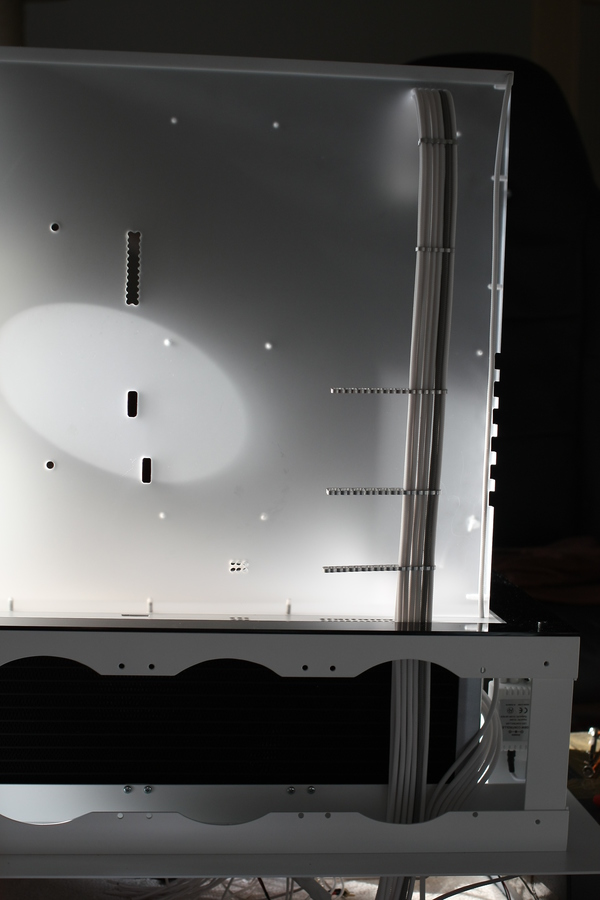
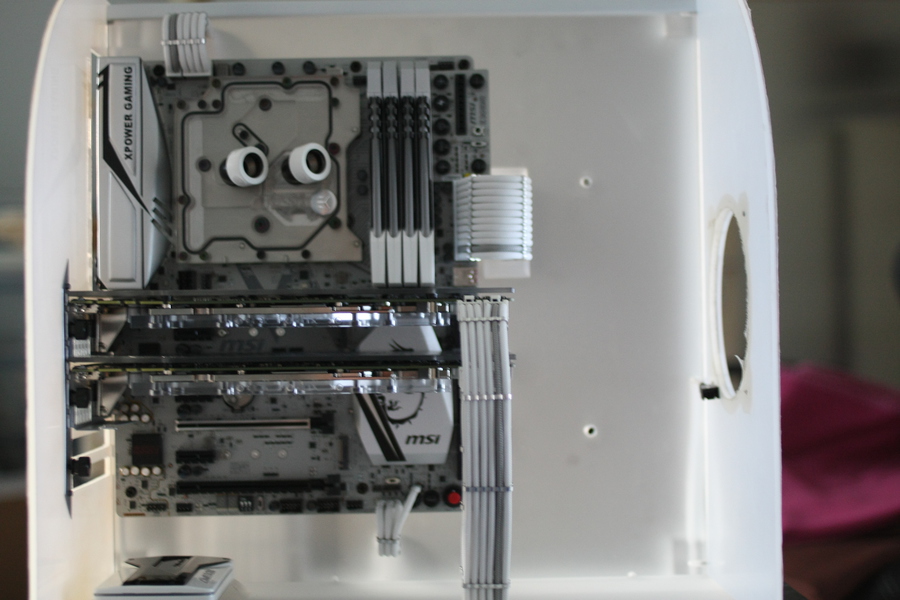
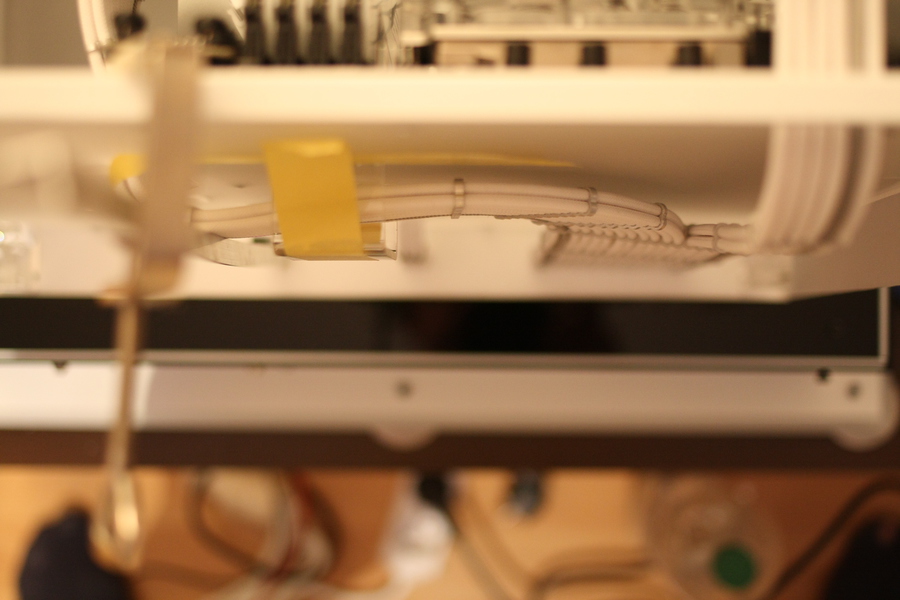
letztens fand ich endlich ein passendes Bending Kit mit dem ich zufrieden war also konnte ich die letzten Rohrdurchführungen setzen und die Verrohrung beenden


war wieder ein riesen Spaß
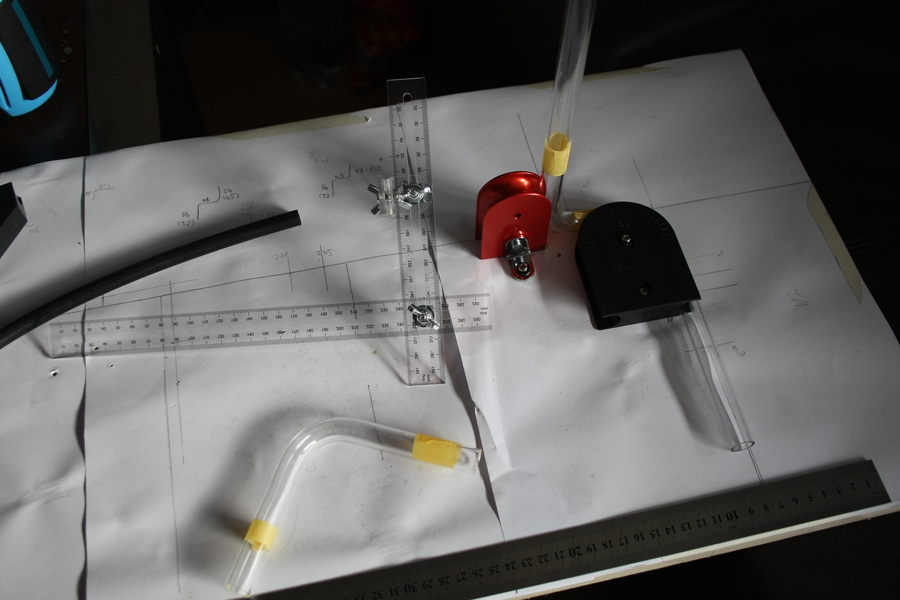
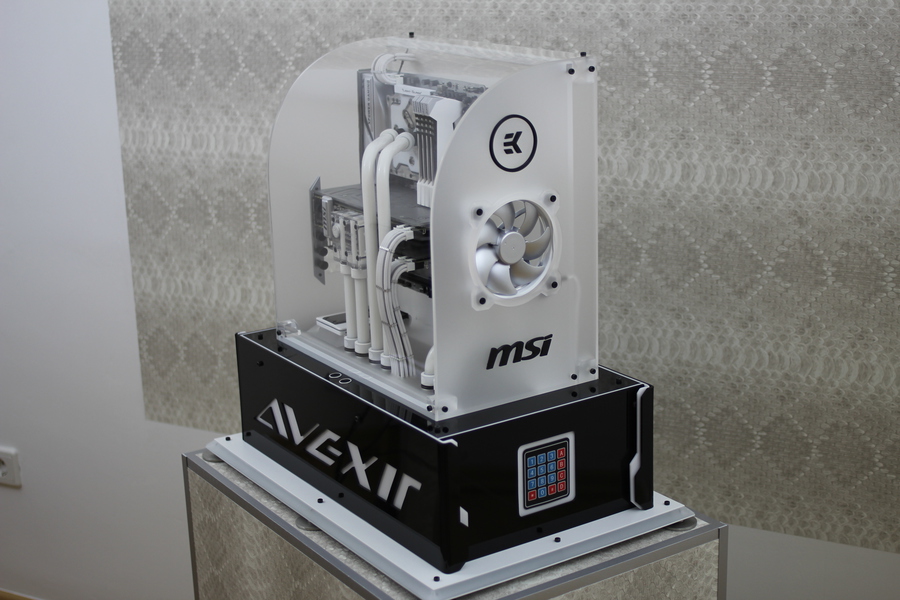
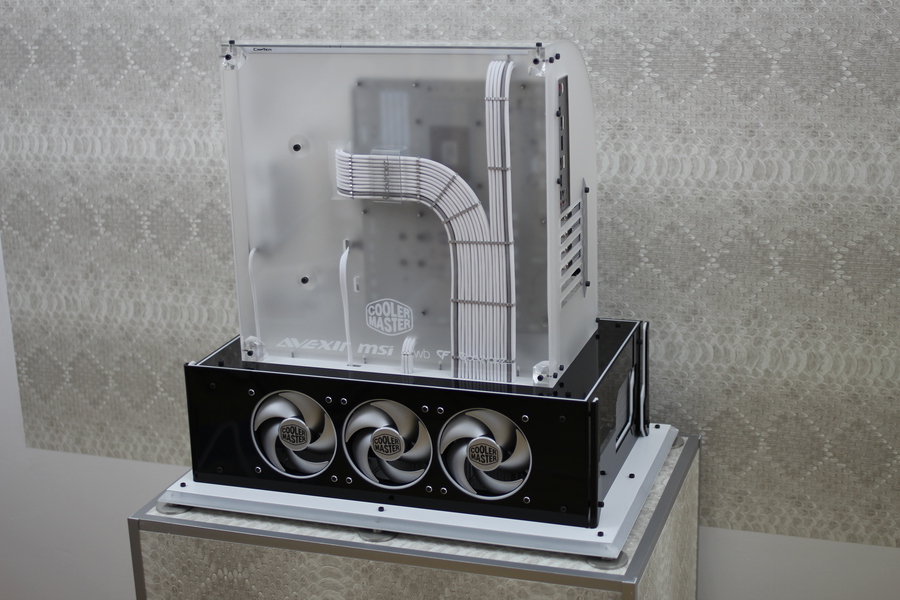
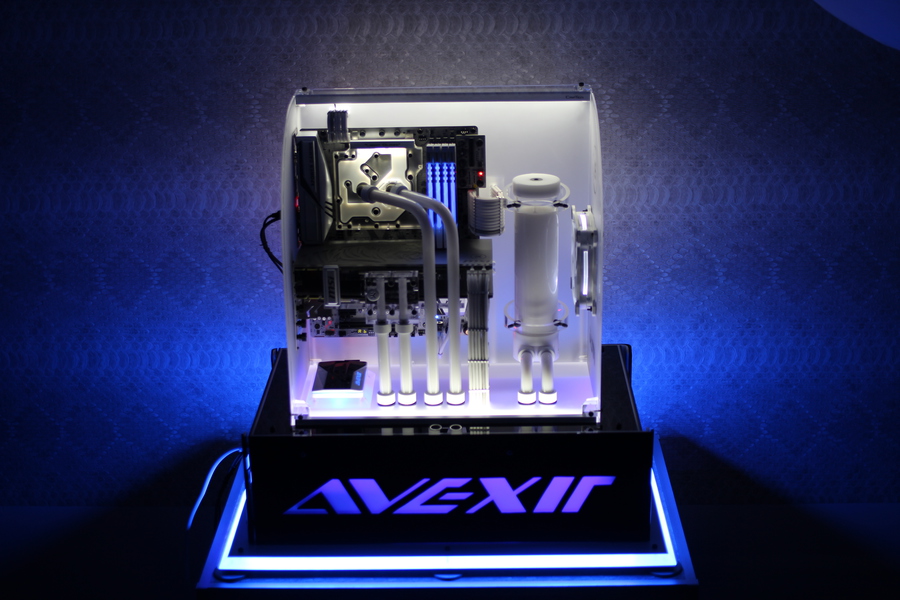
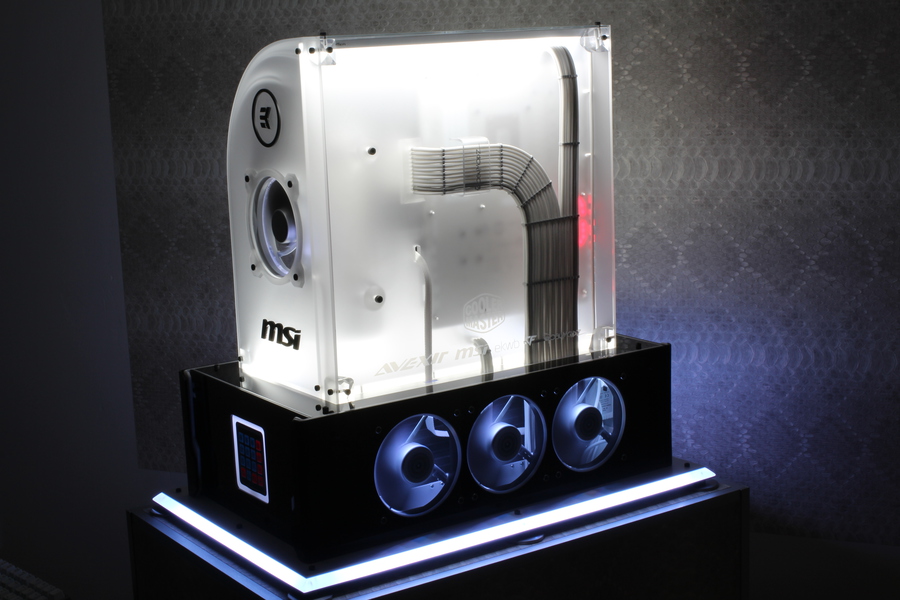
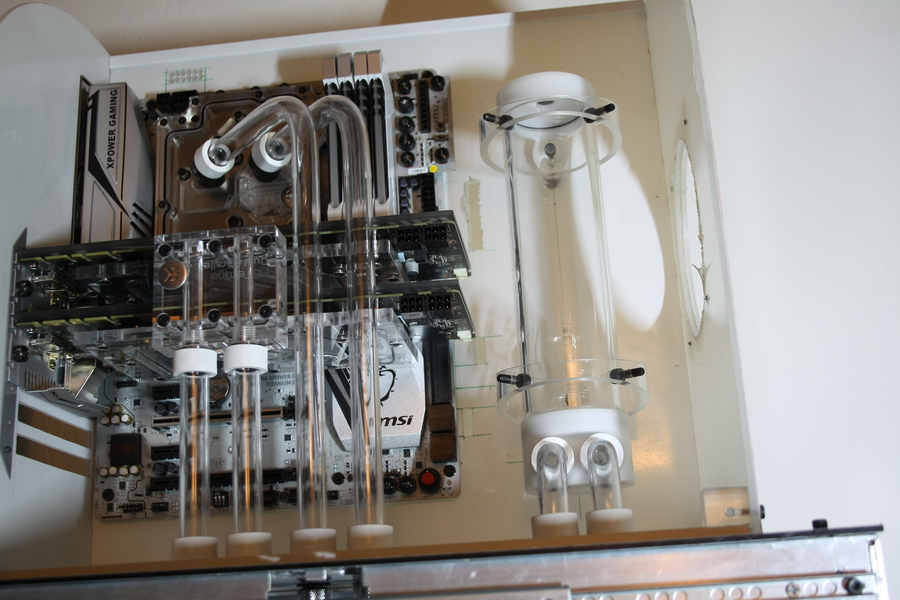
und so hatte ich mir das ganze vorgestellt

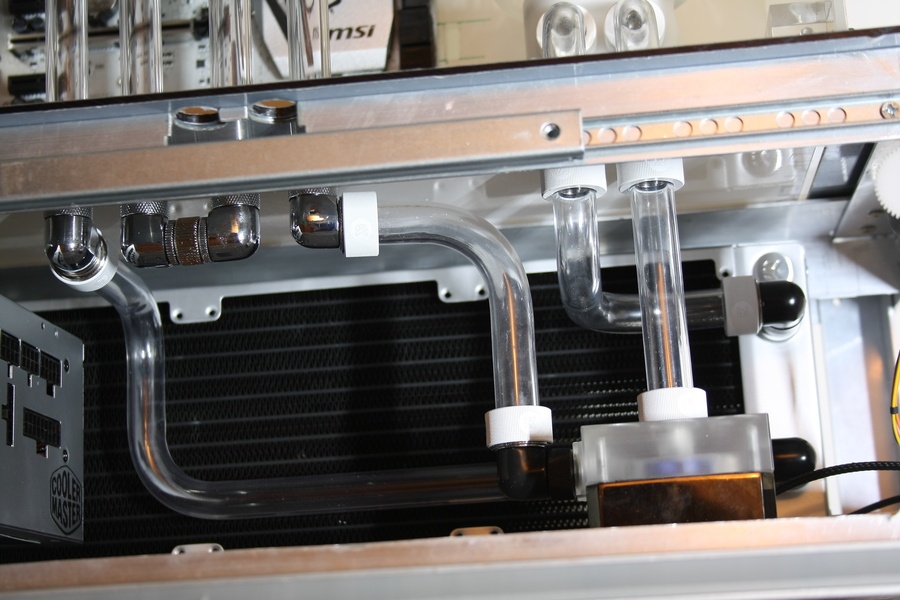
Im Sockel habe ich viel ausprobiert, leider vergaß ich das Foto vom finalen Zustand zu schießen, jetzt ist alles schon wieder zerlegt.
Die Chromwinkel werden noch gegen schwarze ausgetauscht, sollten nächste Woche da sein
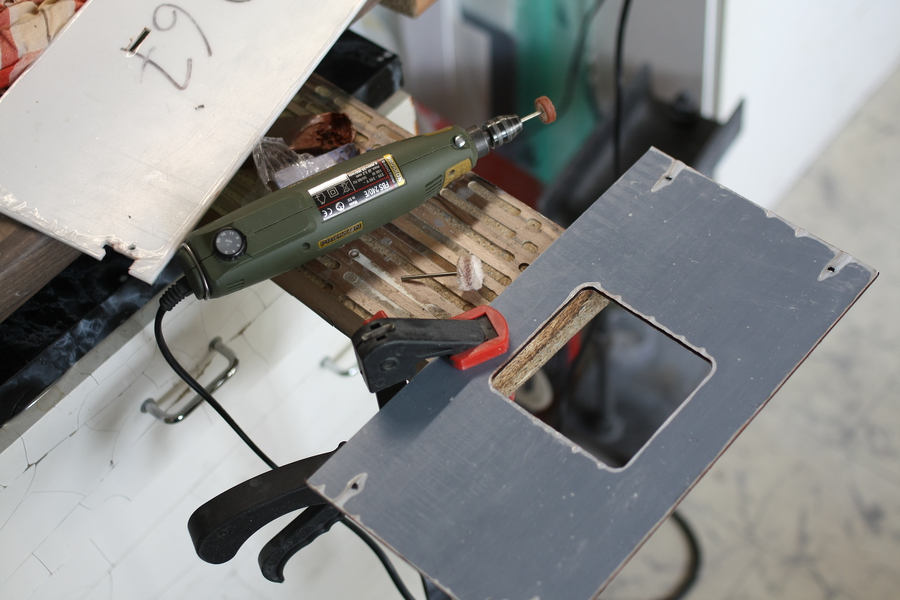
Das Mainboard Tray wird von oben beleuchtet, leider fand ich kein U-Profil in der geplanten Materialstärke, also musste ich den Tray etwas absägen
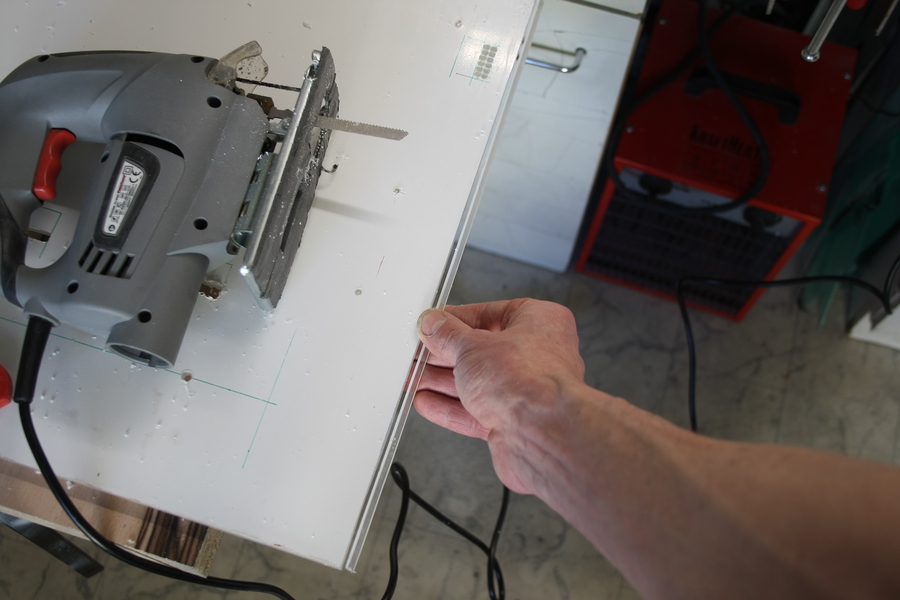
Das U-Profil selbst gefiel mir so eckig auch nicht also habe ich es der Caseform angepasst und die Vorderseite etwas abgerundet

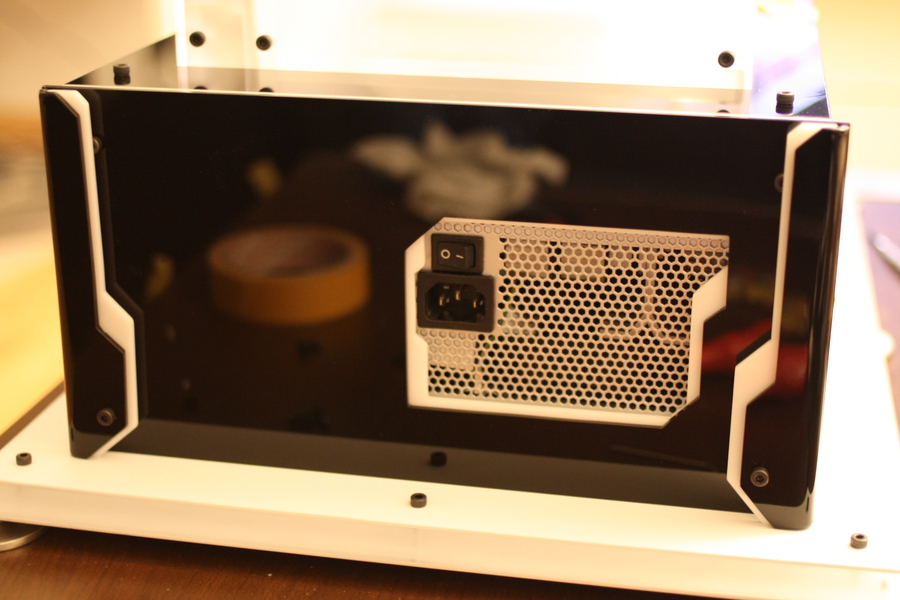
Die Abluft unter der PSU hatte ich bereits ausgeschnitten aber nicht bedacht das die Winkel vom Sockel diesen noch verdecken, also musste ich hier auch noch etwas anpassen


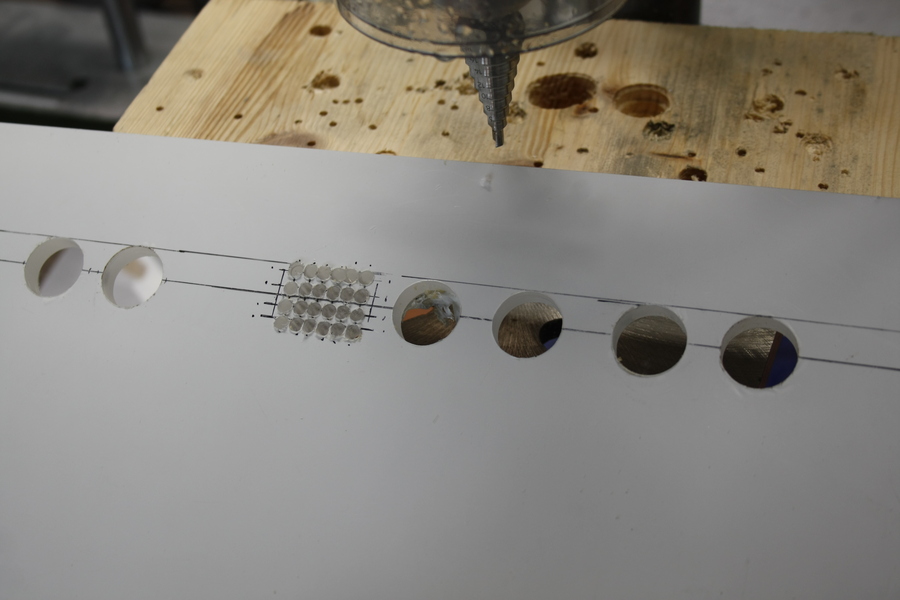
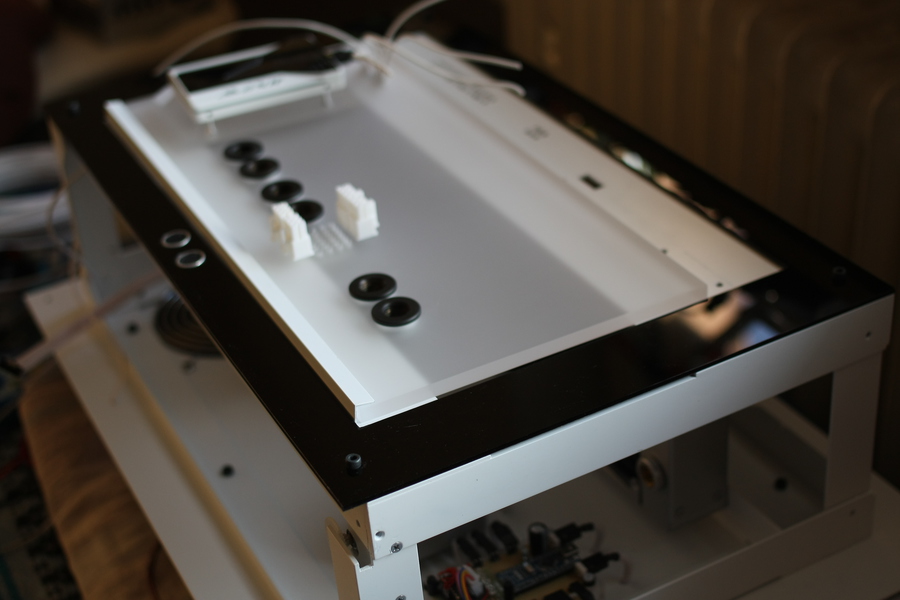
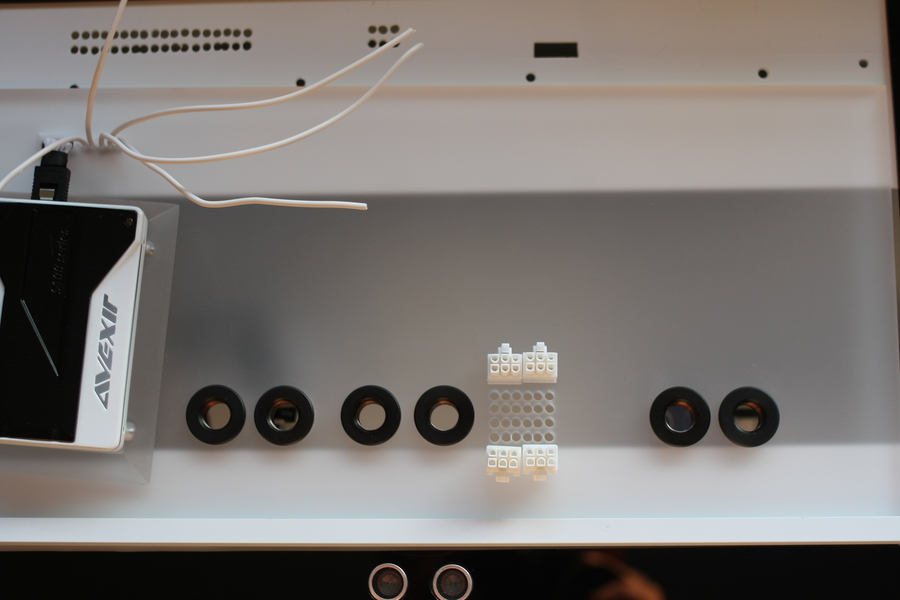
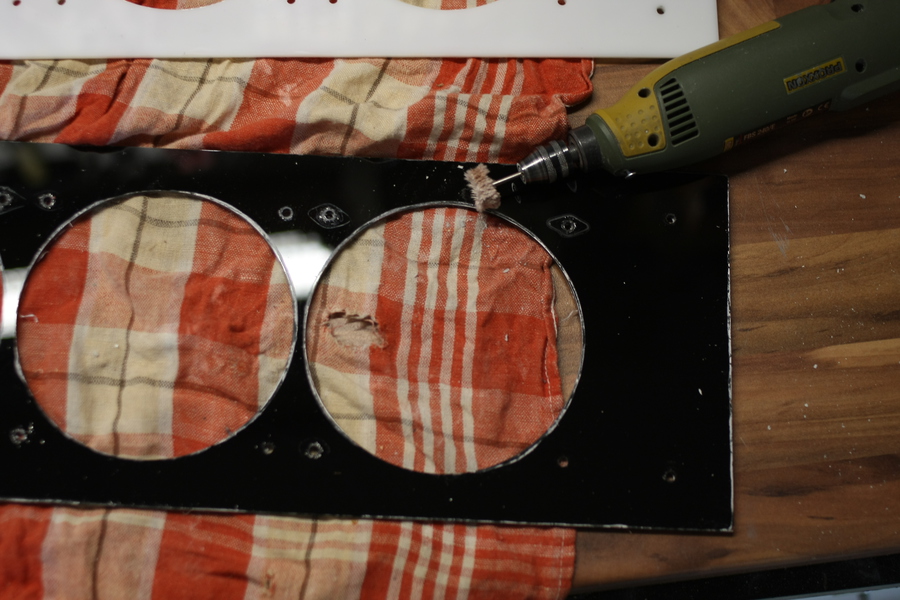
nun begann ich mit dem setzen aller benötigten Löcher für den Arduino und der Pumpe

hier der Buzzer hinter der PSU
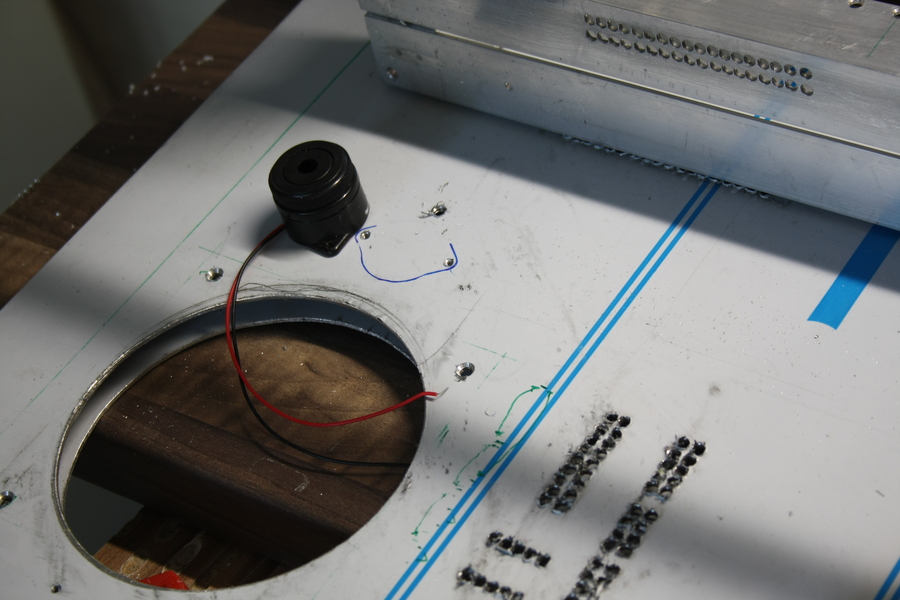
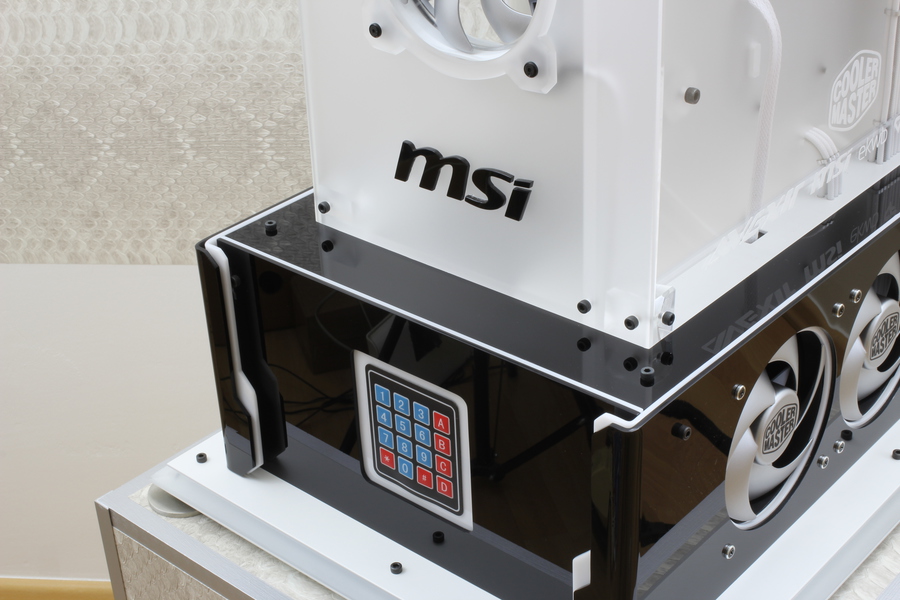
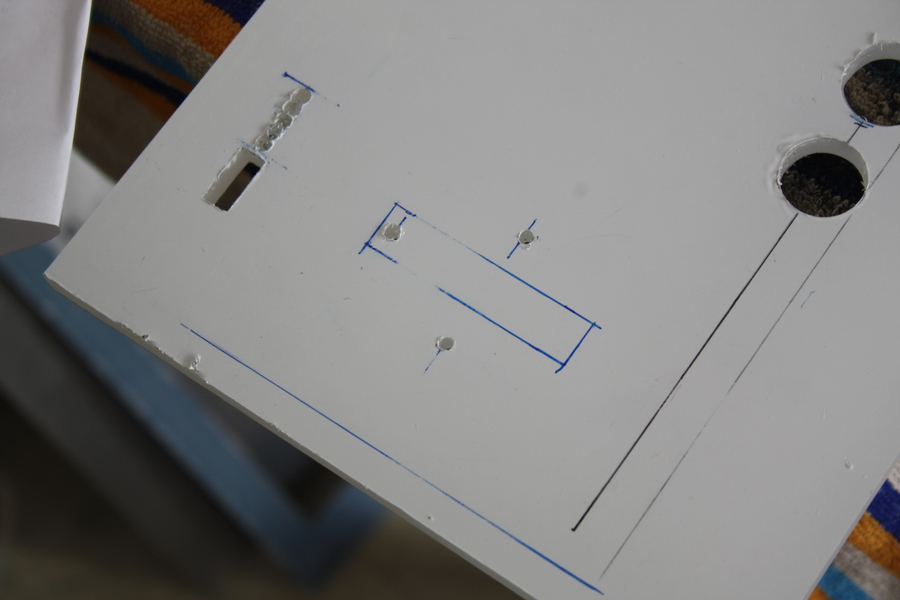
und noch das Keypad

für den Schallsensor noch die Löcher für die Justierung gesetzt, M1 , schrauben und Gewindeschneider sind auf dem Weg

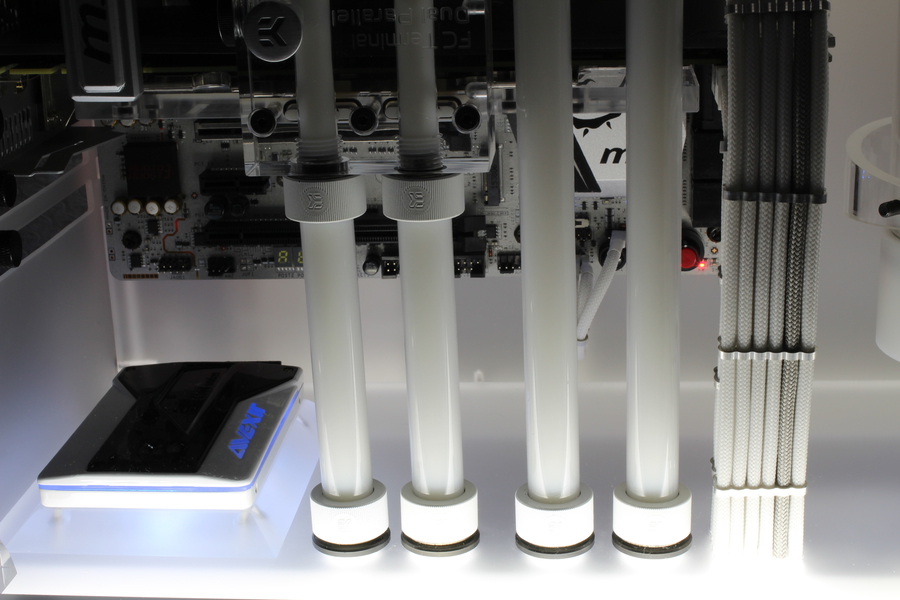
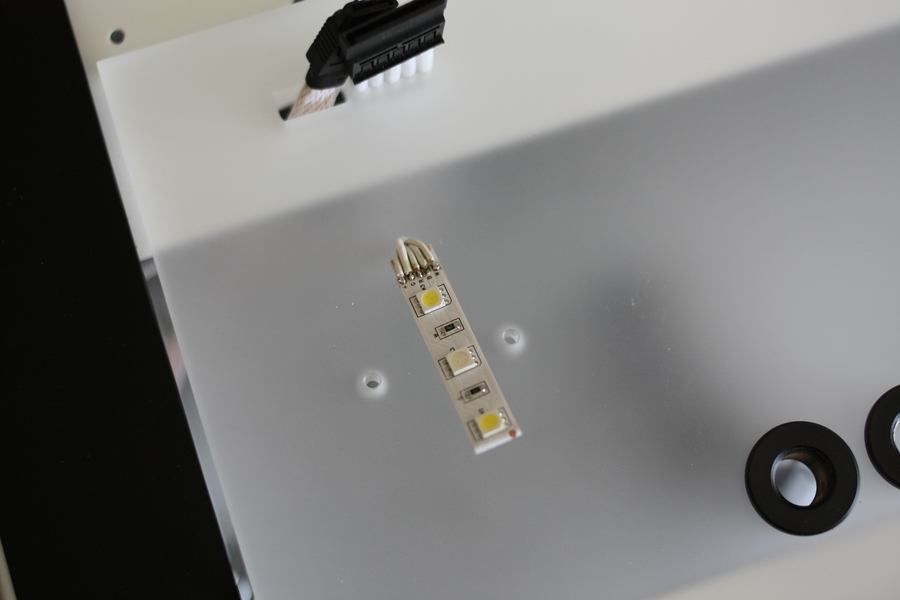
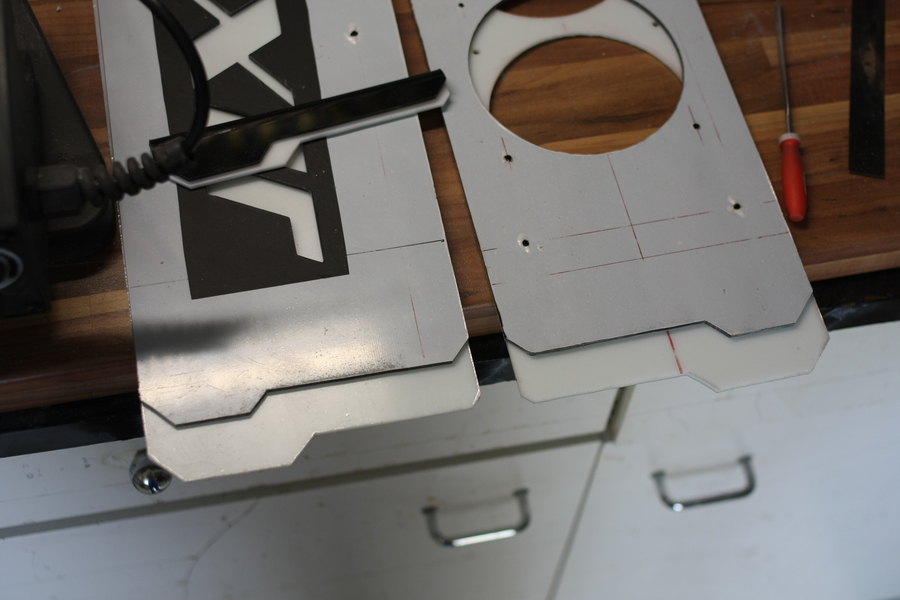
nun noch die Position für die SSD mit dem beleuchteten Tron ermittelt und die Löcher gesetzt
Der ganze Mainboard Tray wird nun mit dem Sockel verschraubt

nun ging es letzte Woche ans lackieren, alles erst mal geschliffen gereinigt und mit Alu Grundierung lackiert


nun folgen noch mehrere Schichten Weiß mit zwischenschliff und div Spachtel arbeiten


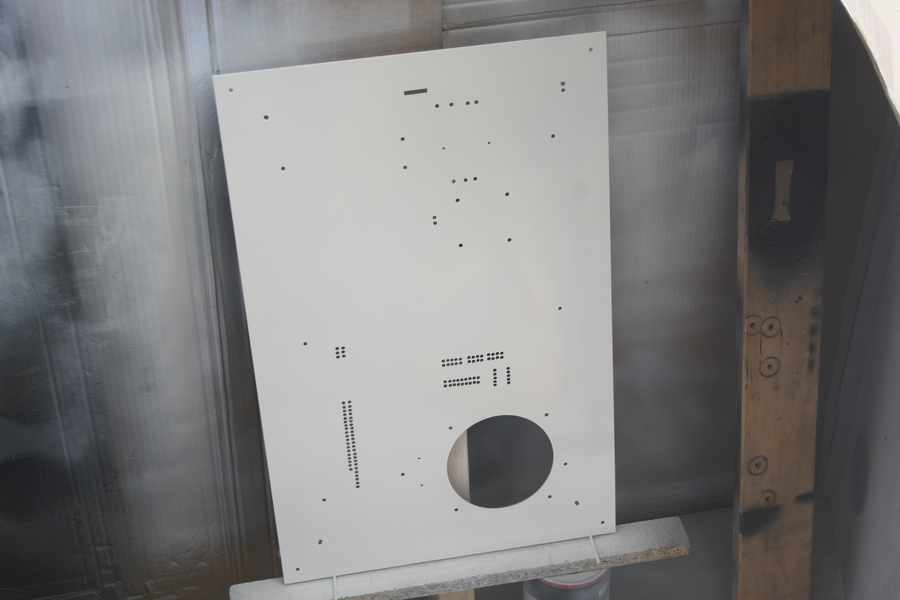
und fertig

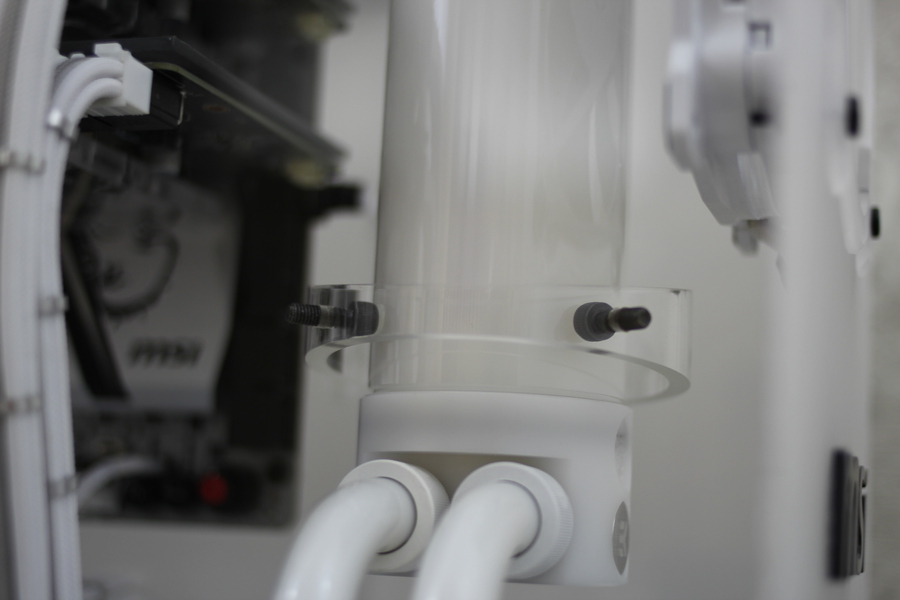
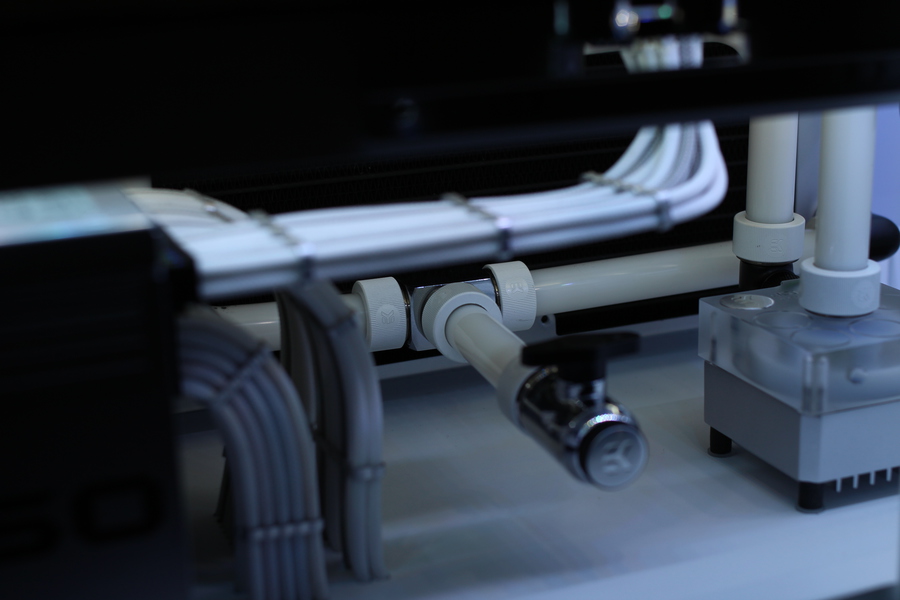
der Pumpen Boden wurde in silber lackiert
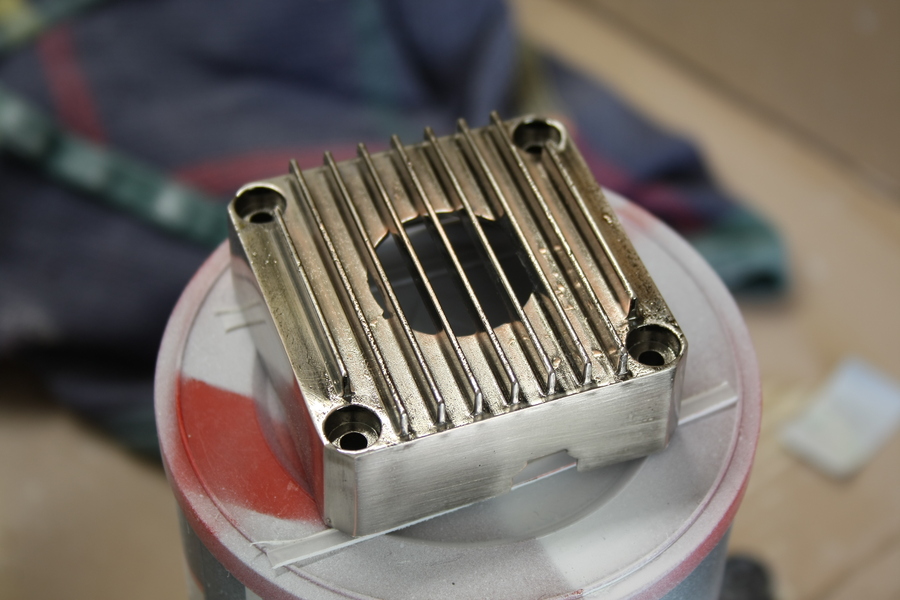

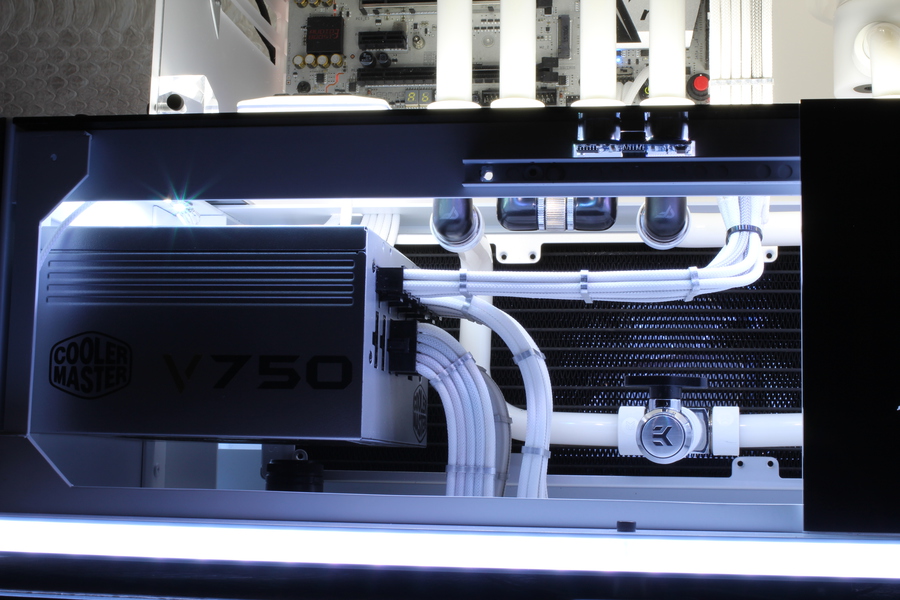
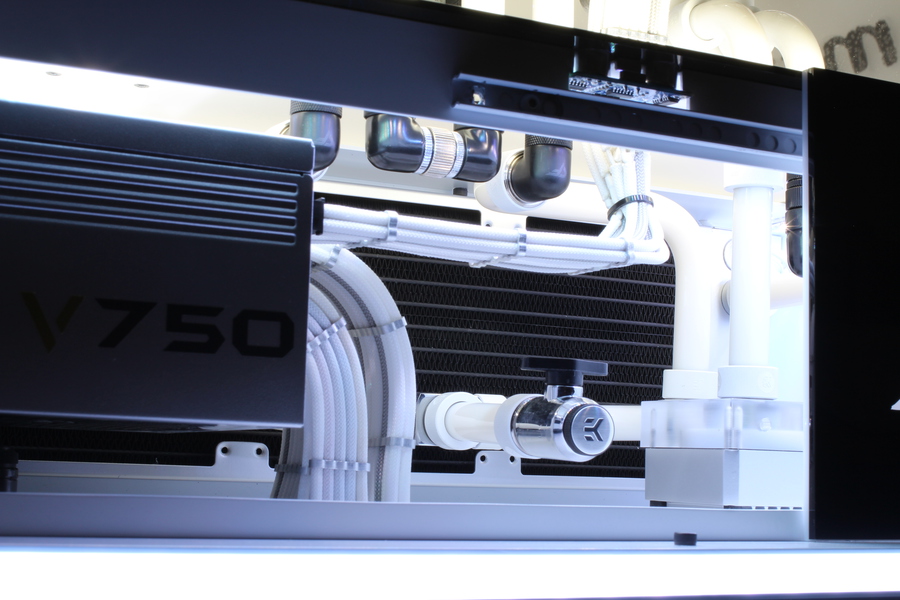
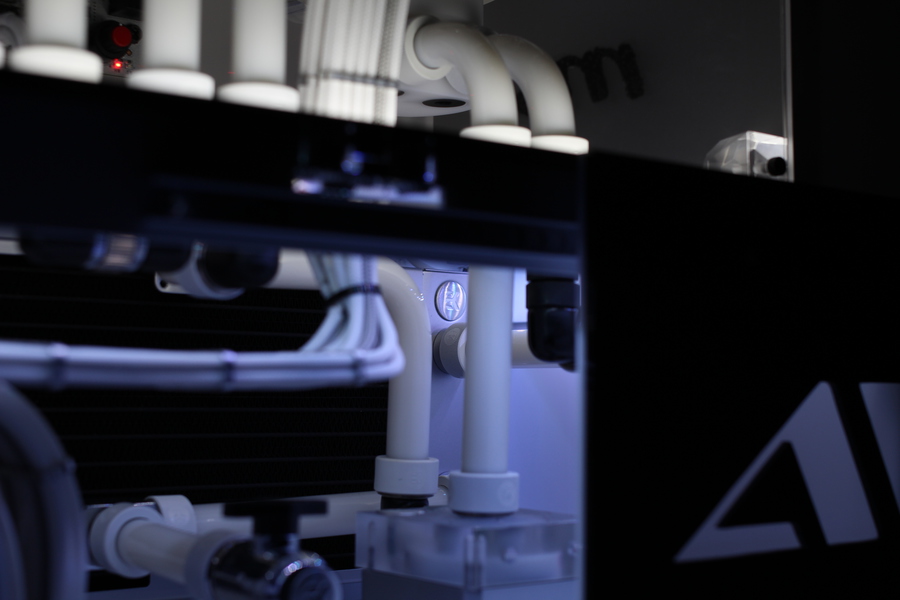
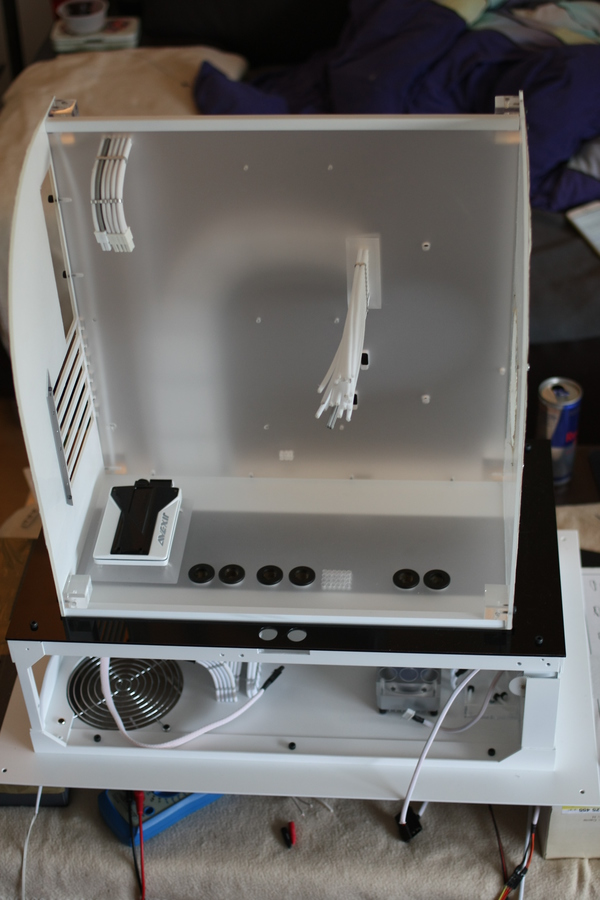
ich fing nun schon mal langsam mit dem zusammen bau an, hier ein Blick unter die PSU


Aber es gab noch andere Probleme,
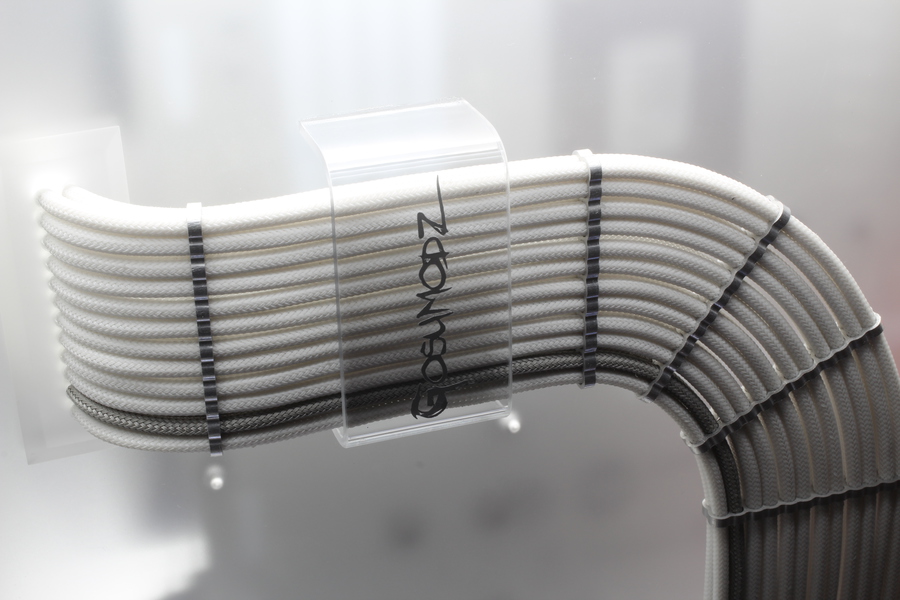
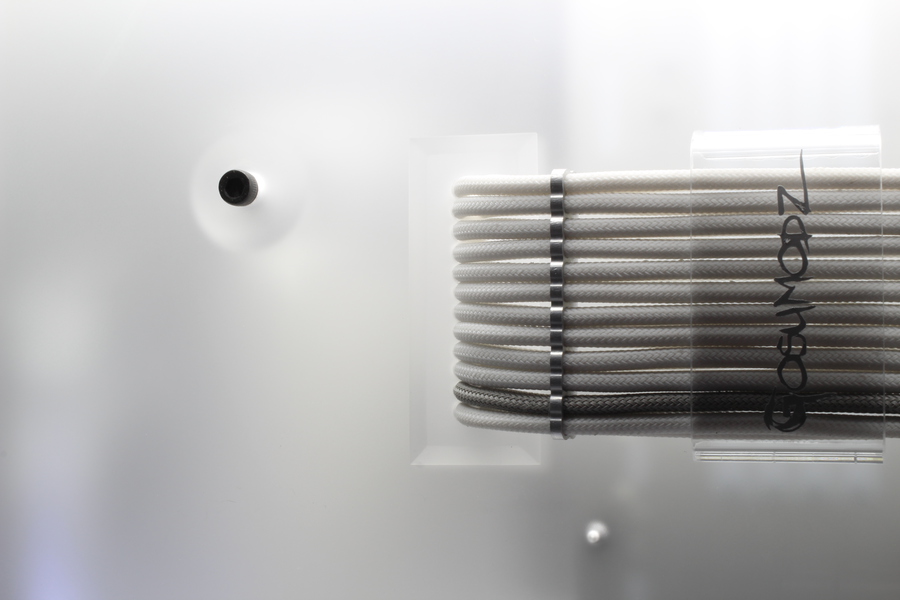
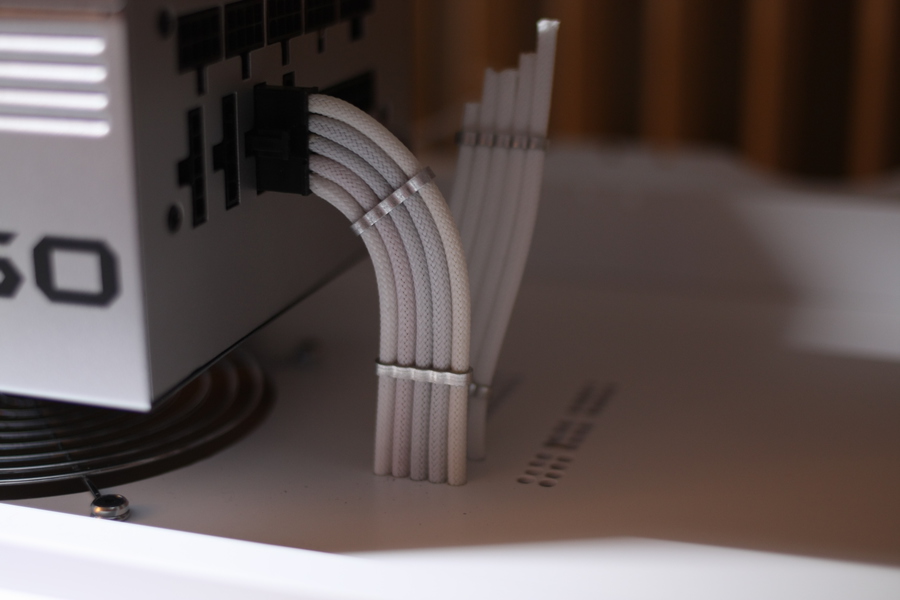
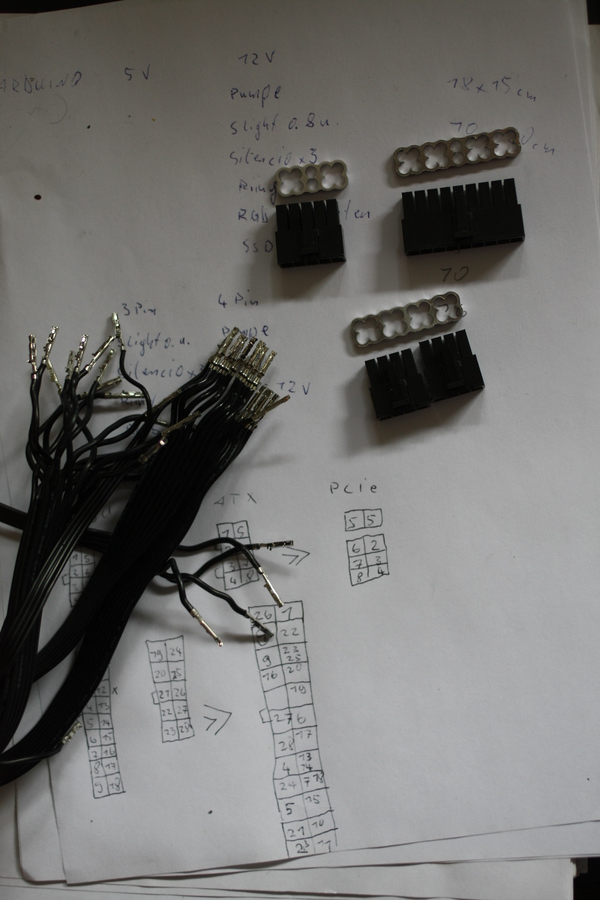
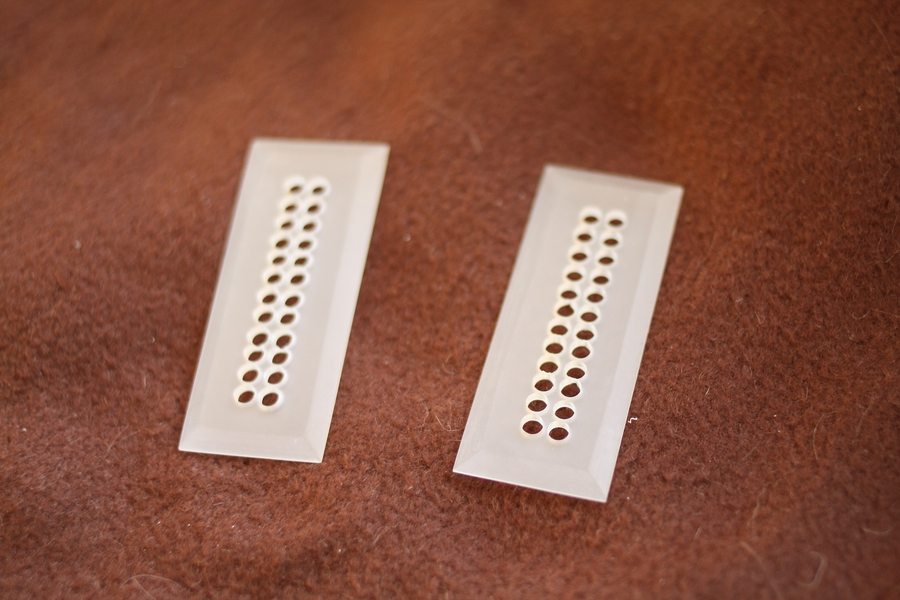
Da ich eine spezielle Kabelverlegung geplant habe, versuche ich schon seit 3 Monaten jemanden zu finden der mir Kabelcombs im Gosu stil fräst aber kein Firma ist in der Lage eine Vektor Datei auf ein 4mm Großes Loch umzuwandeln.
Bei meinem Cousin ist die Ölpumpe seiner CNC defekt, also hatte ich nur eine Wahl, ich durfte letztes Wochenende 15h selbst an der CNC stehen und im 5min Takt den Fräser ölen.
Hier mal die Location(ein Traum)

und so ging es dann los
man war das langweilig, 12h später
von München wieder zu hause in Pforzheim angekommen, durfte ich dann alles noch von Hand entgraten und reinigen.
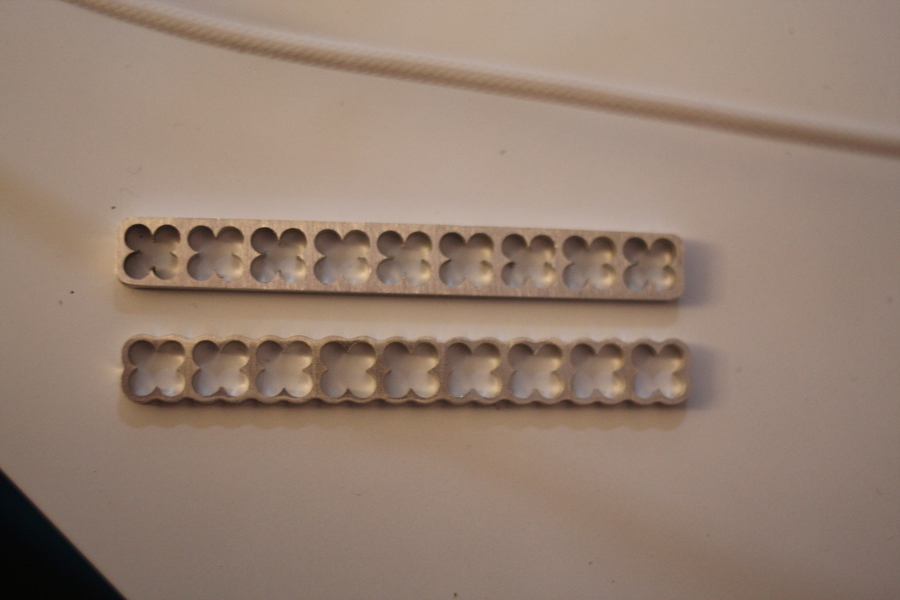
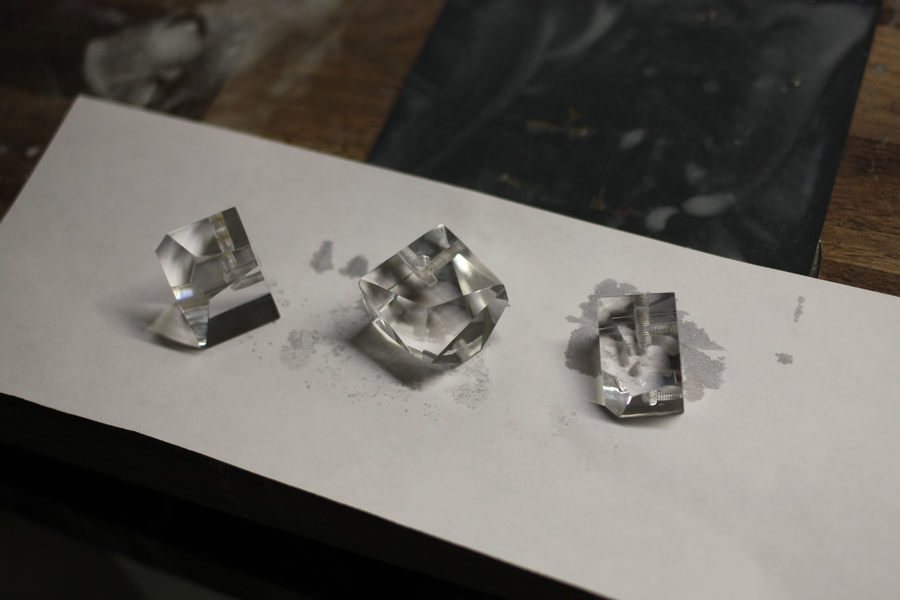
Ich hab mir da etwas Kies von der Straße besorgt und die ganzen Combs eine Weile durchgeschüttelt und gerade die Innenseiten nicht schleifen zu müssen

allerdings waren die Spitzen im Kleeblatt so spitz das ich sie von Hand alle noch entgraten musste

von außen habe ich alles mit 600er Papier geschliffen

und dann alle noch von Hand mit Waschpaste und dann mit Spiritus gereinigt

Das schlimme ist, das ist nur die Hälfte der Combs die ich benötige aber ich hätte es dieses Wochenende nicht mehr geschafft, nur 3h Schlaf und am Case wollte ich auch weiter arbeiten.
Das ganze entgraten und reinigen hat mich den ganzen Sonntag gekostet und die Gosumodz Aliance Combs sehen immer noch besser aus :P .
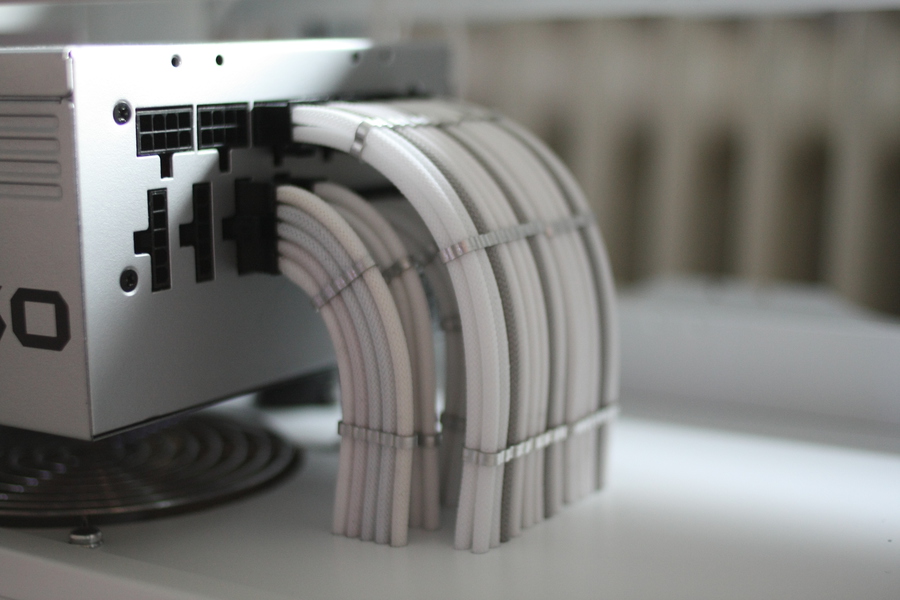
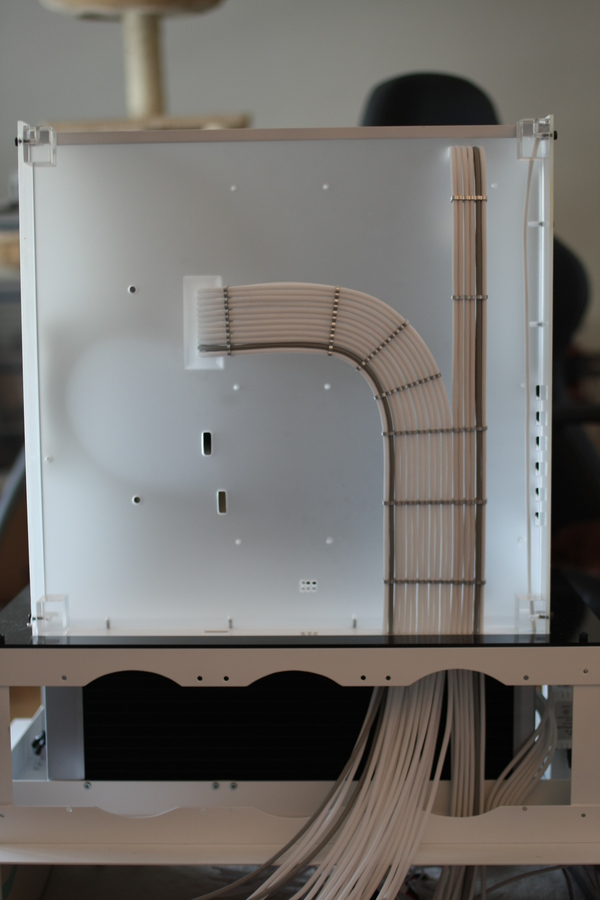
Auf jeden fall kann ich nun endlcih mit der Verkabelung beginnen und muss dann nur noch alle Plexiglas Kanten polieren bzw Satinieren.
Wir haben ja am Montag schon wieder nen Feiertag, ich denke bis dahin werde ich gut voran kommen.
Wir nähern uns den letzten Updates.
Da der Fertigstellungstermin immer Näher rückt habe ich die Worklogs etwas vernachlässigt, sorry.
Also ich fasse nochmal den ganzen Aufbau des Arduinos zusammen.
Folgende Komponenten werden verbaut, von oben links angefangen, so wie man schreibt.
Stepper Motor 28BYJ-48
Driver ULN2003
Schallsensor HC SR04
90db Buzzer
Keypad
Arduino Nano
Infrarot Empfänger
kondensator 1000 microfarad
Wiederstaand 470 Ohm
div. Pins Connectors
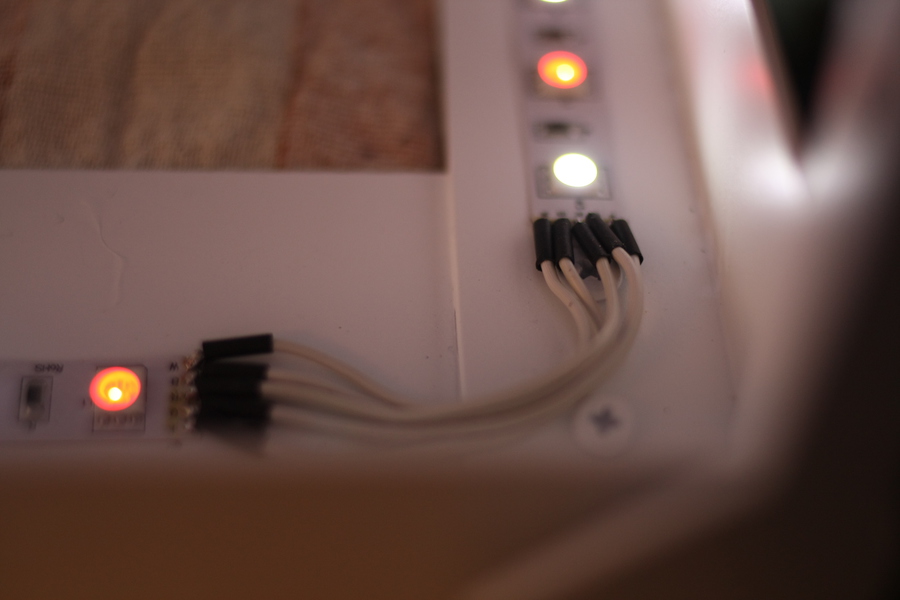
Digitale RGB LED Strip WS2812B
Fernbedienung
Was Macht es?
-Der Motor öffnet und schließt die Schiebetür im Sockel.
Lässt sich Wahlweise durch die Fernbedienung oder das Keypad öffnen schließen.
LED´s in der Bodenplatte signalisieren Orangenes Lichtsignal(blinkend)
-Der Schallsensor deckt das ganze Window ab und gibt Alarm sobald das Window berührt wird.
LED´s in der Bodenplatte leuchten Rot, Buzzer ertönt
-Der PC wird sich über das Keypad Starten und Reseten lassen
- über das Keypad und die Fernbedienung lassen sich verschieden programmierte Lichtspiele starten
Der Arduino ist somit komplett belegt. ;-)
Im Februar habe ich einen kleinen Crashkurs im Arduino programmieren belegt und benutze nun folgenden Sketch, welchen ich teils selbst geschrieben bzw. meinen Bedürfnissen angepasst habe.
CODE:
Code:
#include "Stepper.h"
#include "Keypad.h"
#include "IRremote.h"
#include <Adafruit_NeoPixel.h>
#ifdef __AVR__
#include <avr/power.h>
#include "FastLED.h"
/*----- Variables, Pins -----*/
#define DATA_PIN A4
#define LED_TYPE WS2812B
#define COLOR_ORDER GRB
#define NUM_LEDS 120
CRGB leds[NUM_LEDS];
#define BRIGHTNESS 250
#define FRAMES_PER_SECOND 120
#endif
#define PIN A6 //power
#define PIN A7 //reset
#define PIN A4 //RGBs
#define STEPS 32 // Number of steps per revolution of Internal shaft
int Steps2Take; // 2048 = 1 Revolution
int receiver = A5; // Signal Pin of IR receiver to Arduino Digital Pin 12
int trigPin = 10;
int echoPin = 11;
int buzzer = 12;
int power = A6;
int reset = A7;
/*-----( Declare objects )-----*/
// Setup of proper sequencing for Motor Driver Pins
// In1, In2, In3, In4 in the sequence 1-3-2-4
Stepper small_stepper(STEPS, A0, A2, A1, A3);
IRrecv irrecv(receiver); // create instance of 'irrecv'
decode_results results; // create instance of 'decode_results'
Adafruit_NeoPixel strip = Adafruit_NeoPixel(120, A4, NEO_GRB + NEO_KHZ800);
//Deklarationen Keypad
const byte numRows = 4; //number of rows on the keypad
const byte numCols = 4; //number of columns on the keypad
//keymap defines the key pressed according to the row and columns just as appears on the keypad
char keymap[numRows][numCols] =
{
{'1', '2', '3', 'A'},
{'4', '5', '6', 'B'},
{'7', '8', '9', 'C'},
{'*', '0', '#', 'D'}
};
//Hier die richtigen Pins eintragen!!! Anschlussgrafik gibt es z.B. hier http://www.learningaboutelectronics.com/Articles/Arduino-keypad-circuit.php
byte rowPins[numRows] = {9, 8, 7, 6};
byte colPins[numCols] = {5, 4, 3, 2};
//initializes an instance of the Keypad class
Keypad myKeypad = Keypad(makeKeymap(keymap), rowPins, colPins, numRows, numCols);
void setup()
{
irrecv.enableIRIn(); // Start the receiver
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzer, OUTPUT);
pinMode(power, OUTPUT);
pinMode(reset, OUTPUT);
// tell FastLED about the LED strip configuration
FastLED.addLeds<LED_TYPE, DATA_PIN, COLOR_ORDER>(leds, NUM_LEDS).setCorrection(TypicalLEDStrip);
// set master brightness control
FastLED.setBrightness(BRIGHTNESS);
strip.begin();
strip.show(); // Initialize all pixels to 'off'
}
// List of patterns to cycle through. Each is defined as a separate function below.
typedef void (*SimplePatternList[])();
SimplePatternList gPatterns = { sinelon,};
uint8_t gCurrentPatternNumber = 0; // Index number of which pattern is current
uint8_t gHue = 0; // rotating "base color" used by many of the patterns ,0white,250red,100green,150blue
void loop()
{
char keypressed = myKeypad.getKey(); //Tastedruck am Keypad erfassen
if (keypressed == 'A')
motorLaufen(8700);
if (keypressed == 'B')
motorLaufen(-8700);
if (keypressed == '1')
colorWipe(strip.Color(127, 127, 127), 30); // White
if (keypressed == '*')
digitalWrite(power, HIGH );
digitalWrite(power, LOW );
if (keypressed == '#')
digitalWrite(reset, HIGH );
digitalWrite(reset, LOW );
if (irrecv.decode(&results)) {
if (results.value == 16761405) // forward pressed
motorLaufen(8700);
if (results.value == 16712445) // backwards pressed
motorLaufen(-8700);
if (results.value == 16738455) // taste 0
colorWipe(strip.Color(127, 127, 127), 30); // White
if (results.value == 16724175) // taste 1
colorWipe(strip.Color(0, 255, 0), 30); // Green
if (results.value == 16718055)//taste 2
theaterChase(strip.Color(127, 127, 127), 1000); // White
if (results.value == 16743045) //taste 3
colorWipe(strip.Color( 255, 100, 0), 30); // Orange
if (results.value == 16716015)//taste 4
colorWipe(strip.Color( 255, 0, 0), 30); // red
if (results.value == 16726215)//taste 5
theaterChase(strip.Color(0, 255, 0), 500); // Green
if (results.value == 16734885)//taste 6
theaterChase(strip.Color(0, 0, 255), 1000); // Blue
if (results.value == 16728765)//taste 7
colorWipe(strip.Color(0, 0, 255), 30); // blue
if (results.value == 16730805)//taste 8
theaterChase(strip.Color(255, 0, 0), 100); // Red
if (results.value == 16732845)//taste 9
theaterChase(strip.Color(255, 100, 0), 1000); // Orange
if (results.value == 16769055)//taste EQ
rainbow(20);
if (results.value == 16748655)//taste vol +
rainbowCycle(10);
if (results.value == 16754775)//taste vol -
theaterChaseRainbow(50);
if (results.value == 16753245)//taste Power
// Call the current pattern function once, updating the 'leds' array
{ gPatterns[gCurrentPatternNumber]();
// send the 'leds' array out to the actual LED strip
FastLED.show();
// insert a delay to keep the framerate modest
FastLED.delay(1000 / FRAMES_PER_SECOND);
}
if (results.value == 16736925)//taste Mode
rainbow(20);
if (results.value == 16769565)//taste Mute
rainbow(20);
if (results.value == 16720605)//taste Pause
rainbow(20);
if (results.value == 16750695)//taste gehe zurück
rainbow(20);
if (results.value == 16756815)//taste U/SD
rainbow(20);
}
if (millis() % 10 == 0)
{ long duration, distance;
digitalWrite(trigPin, LOW);
digitalWrite(trigPin, HIGH);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration / 2) / 29.1;
if (distance < 40) {
digitalWrite(buzzer, HIGH );
theaterChase1(strip.Color(255, 0, 0), 100); // Red
strip.show();
}
else {
digitalWrite(buzzer, LOW );
}
if (distance > 200) {
Serial.println("Out of range");
}
if (distance < 0) {
Serial.println("Out of Range");
}
}
}
/* --end main loop -- */
void motorLaufen(int mSteps) {
theaterChase(strip.Color(255, 100, 0), 1000); // Orange
small_stepper.setSpeed(1000);
Steps2Take = mSteps; // Rotate CCW
small_stepper.step(Steps2Take);
irrecv.resume(); // receive the next value
strip.show();
MotorAus();
}
void MotorAus ()
{
digitalWrite(A0, LOW);
digitalWrite(A1, LOW);
digitalWrite(A2, LOW);
digitalWrite(A3, LOW);
}
// Fill the dots one after the other with a color
void colorWipe(uint32_t c, uint8_t wait) {
for (uint16_t i = 0; i < strip.numPixels(); i++) {
strip.setPixelColor(i, c);
strip.show();
delay(wait);
}
irrecv.resume();
}
//Theatre-style crawling lights.
void theaterChase(uint32_t c, uint8_t wait) {
for (int j = 0; j < 10; j++) { //do 10 cycles of chasing
for (int q = 0; q < 2; q++) {
for (uint16_t i = 0; i < strip.numPixels(); i = i + 2) {
strip.setPixelColor(i + q, c); //turn every third pixel on
}
strip.show();
delay(wait);
for (uint16_t i = 0; i < strip.numPixels(); i = i + 2) {
strip.setPixelColor(i + q, 0); //turn every third pixel off
}
}
}
irrecv.resume();
}
//Theatre-style crawling lights.
void theaterChase1(uint32_t c, uint8_t wait) {
for (int j = 0; j < 2; j++) { //do 10 cycles of chasing
for (int q = 0; q < 2; q++) {
for (uint16_t i = 0; i < strip.numPixels(); i = i + 2) {
strip.setPixelColor(i + q, c); //turn every third pixel on
}
strip.show();
delay(wait);
for (uint16_t i = 0; i < strip.numPixels(); i = i + 2) {
strip.setPixelColor(i + q, 0); //turn every third pixel off
}
}
}
irrecv.resume();
}
void rainbow(uint8_t wait) {
uint16_t i, j;
for (j = 0; j < 256; j++) {
for (i = 0; i < strip.numPixels(); i++) {
strip.setPixelColor(i, Wheel((i + j) & 255));
}
strip.show();
delay(wait);
}
irrecv.resume();
}
// Slightly different, this makes the rainbow equally distributed throughout
void rainbowCycle(uint8_t wait) {
uint16_t i, j;
for (j = 0; j < 256 * 5; j++) { // 5 cycles of all colors on wheel
for (i = 0; i < strip.numPixels(); i++) {
strip.setPixelColor(i, Wheel(((i * 256 / strip.numPixels()) + j) & 255));
}
strip.show();
delay(wait);
}
irrecv.resume();
}
//Theatre-style crawling lights with rainbow effect
void theaterChaseRainbow(uint8_t wait) {
for (int j = 0; j < 256; j++) { // cycle all 256 colors in the wheel
for (int q = 0; q < 3; q++) {
for (uint16_t i = 0; i < strip.numPixels(); i = i + 3) {
strip.setPixelColor(i + q, Wheel( (i + j) % 255)); //turn every third pixel on
}
strip.show();
delay(wait);
for (uint16_t i = 0; i < strip.numPixels(); i = i + 3) {
strip.setPixelColor(i + q, 0); //turn every third pixel off
}
}
}
irrecv.resume();
}
// Input a value 0 to 255 to get a color value.
// The colours are a transition r - g - b - back to r.
uint32_t Wheel(byte WheelPos) {
WheelPos = 255 - WheelPos;
if (WheelPos < 85) {
return strip.Color(255 - WheelPos * 3, 0, WheelPos * 3);
}
if (WheelPos < 170) {
WheelPos -= 85;
return strip.Color(0, WheelPos * 3, 255 - WheelPos * 3);
}
WheelPos -= 170;
return strip.Color(WheelPos * 3, 255 - WheelPos * 3, 0);
}
void sinelon()
{
// a colored dot sweeping back and forth, with fading trails
fadeToBlackBy( leds, NUM_LEDS, 20);
int pos = beatsin16(8, 0, NUM_LEDS); //speed,start-stop,
leds[pos] += CHSV( gHue, 0, 192); // gHue,Multicolor 0=whit 255=rainbow fade ,Bightness
}In dieser Anordnung habe ich dann alles verlötet
Als Halterung eine kleine Glasbox zurecht geschnitten und verklebt
und darauf den Arduino verschraubt
Nun habe ich die Avexir Raiden noch farblich angepasst, die kleinen Endkappen wurden im Ton lackiert
und die Seiten mit Folie bezogen, eine Lackierung war hier zu riskant wergen Farbe abplatzen oder hinterlaufen
und so sehen sie nun aus
letztens fand ich endlich ein passendes Bending Kit mit dem ich zufrieden war also konnte ich die letzten Rohrdurchführungen setzen und die Verrohrung beenden
war wieder ein riesen Spaß
und so hatte ich mir das ganze vorgestellt
Im Sockel habe ich viel ausprobiert, leider vergaß ich das Foto vom finalen Zustand zu schießen, jetzt ist alles schon wieder zerlegt.
Die Chromwinkel werden noch gegen schwarze ausgetauscht, sollten nächste Woche da sein
Das Mainboard Tray wird von oben beleuchtet, leider fand ich kein U-Profil in der geplanten Materialstärke, also musste ich den Tray etwas absägen
Das U-Profil selbst gefiel mir so eckig auch nicht also habe ich es der Caseform angepasst und die Vorderseite etwas abgerundet
Die Abluft unter der PSU hatte ich bereits ausgeschnitten aber nicht bedacht das die Winkel vom Sockel diesen noch verdecken, also musste ich hier auch noch etwas anpassen
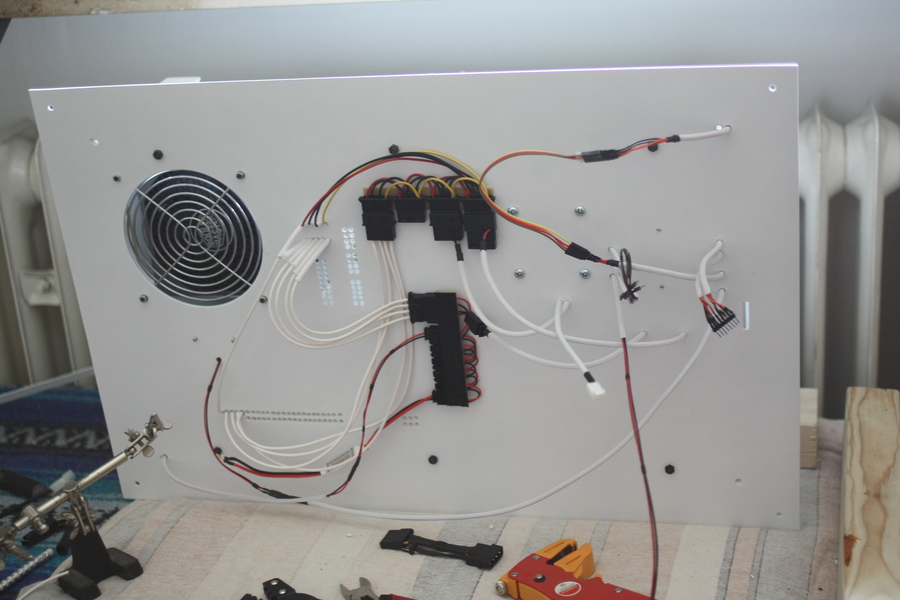
nun begann ich mit dem setzen aller benötigten Löcher für den Arduino und der Pumpe
hier der Buzzer hinter der PSU
und noch das Keypad
für den Schallsensor noch die Löcher für die Justierung gesetzt, M1 , schrauben und Gewindeschneider sind auf dem Weg
nun noch die Position für die SSD mit dem beleuchteten Tron ermittelt und die Löcher gesetzt
Der ganze Mainboard Tray wird nun mit dem Sockel verschraubt
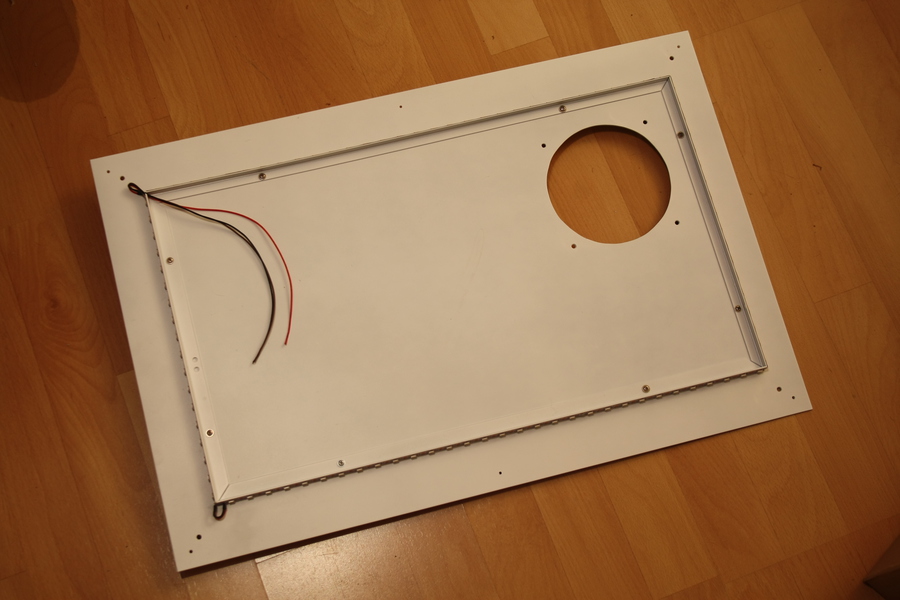
nun ging es letzte Woche ans lackieren, alles erst mal geschliffen gereinigt und mit Alu Grundierung lackiert
nun folgen noch mehrere Schichten Weiß mit zwischenschliff und div Spachtel arbeiten
und fertig
der Pumpen Boden wurde in silber lackiert
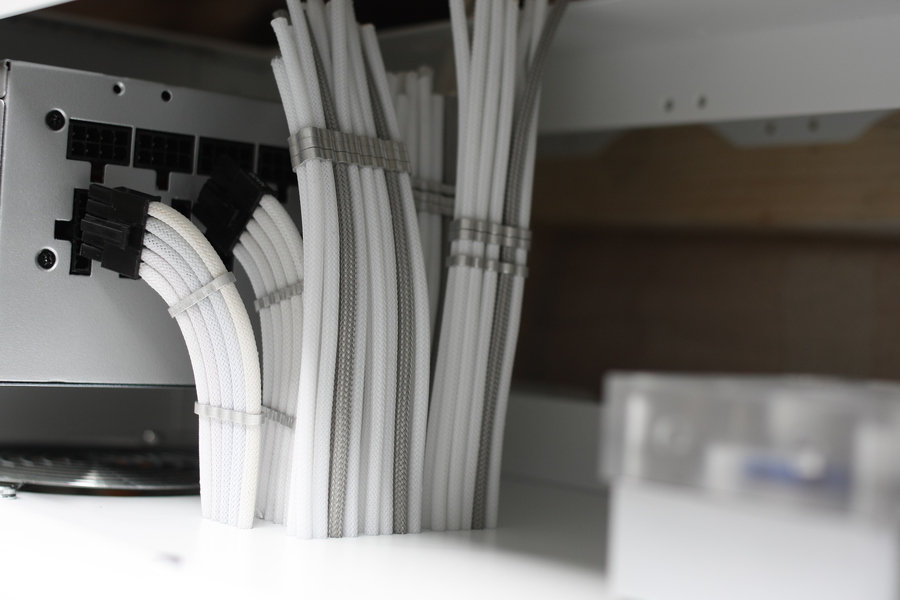
ich fing nun schon mal langsam mit dem zusammen bau an, hier ein Blick unter die PSU
Aber es gab noch andere Probleme,
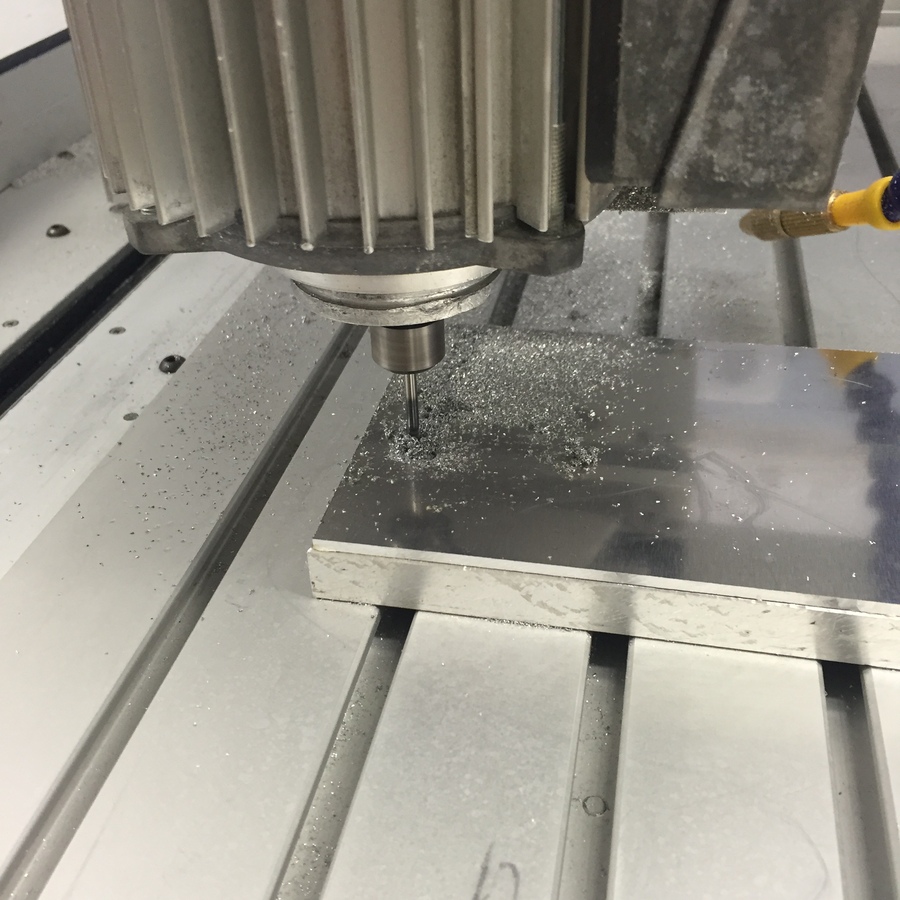
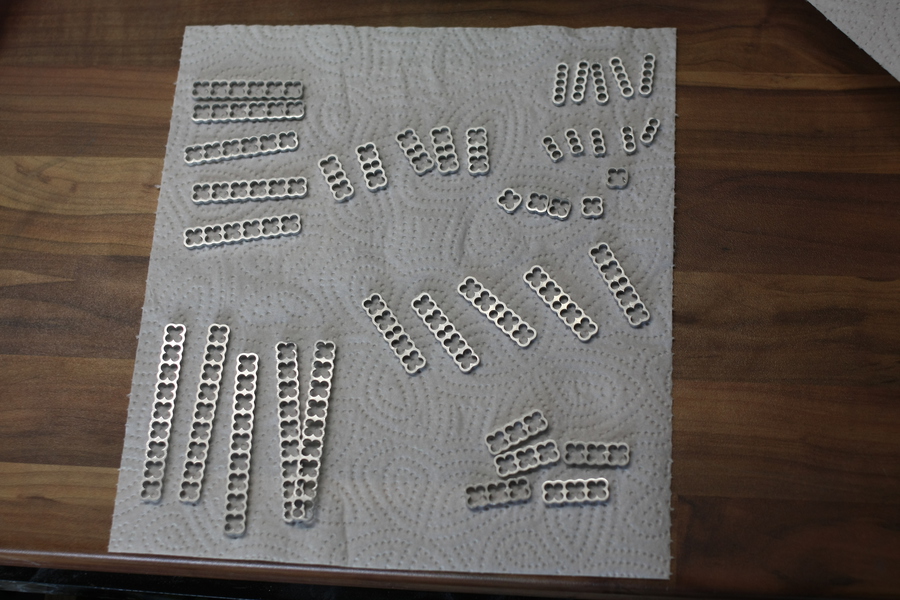
Da ich eine spezielle Kabelverlegung geplant habe, versuche ich schon seit 3 Monaten jemanden zu finden der mir Kabelcombs im Gosu stil fräst aber kein Firma ist in der Lage eine Vektor Datei auf ein 4mm Großes Loch umzuwandeln.
Bei meinem Cousin ist die Ölpumpe seiner CNC defekt, also hatte ich nur eine Wahl, ich durfte letztes Wochenende 15h selbst an der CNC stehen und im 5min Takt den Fräser ölen.
Hier mal die Location(ein Traum)
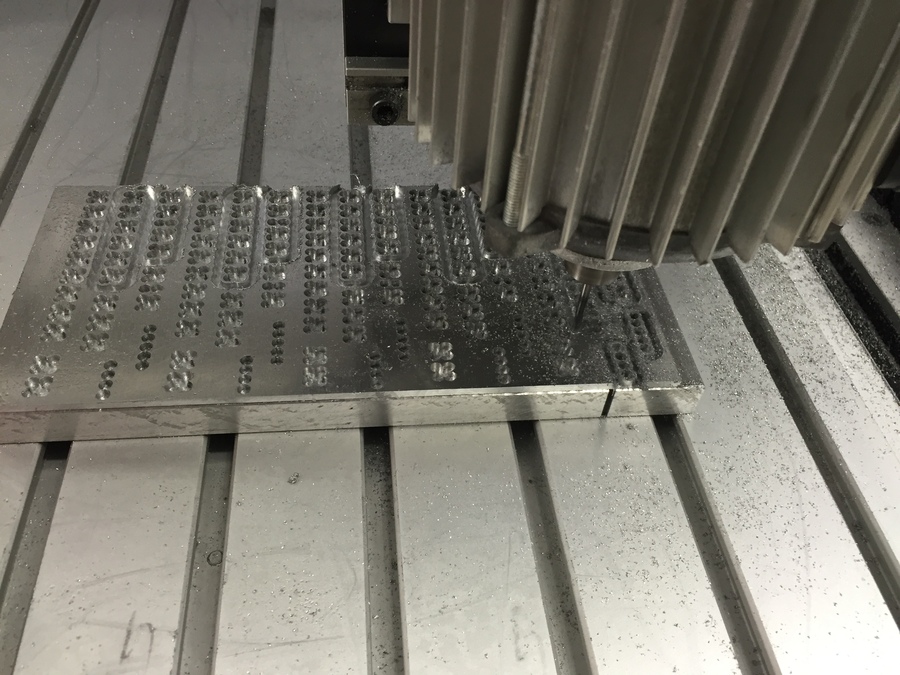
und so ging es dann los
man war das langweilig, 12h später
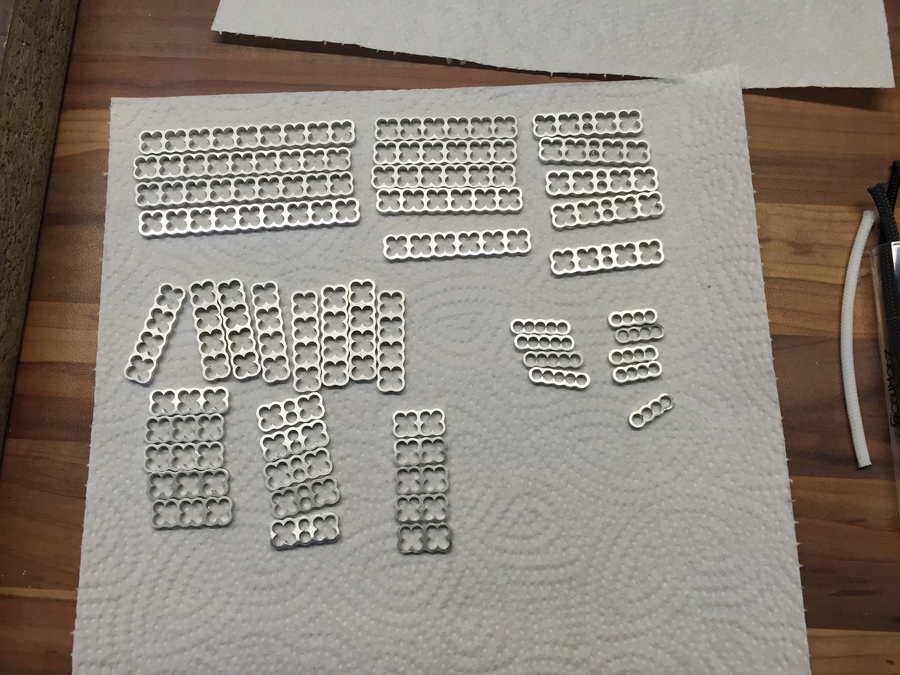
von München wieder zu hause in Pforzheim angekommen, durfte ich dann alles noch von Hand entgraten und reinigen.
Ich hab mir da etwas Kies von der Straße besorgt und die ganzen Combs eine Weile durchgeschüttelt und gerade die Innenseiten nicht schleifen zu müssen
allerdings waren die Spitzen im Kleeblatt so spitz das ich sie von Hand alle noch entgraten musste
von außen habe ich alles mit 600er Papier geschliffen
und dann alle noch von Hand mit Waschpaste und dann mit Spiritus gereinigt
Das schlimme ist, das ist nur die Hälfte der Combs die ich benötige aber ich hätte es dieses Wochenende nicht mehr geschafft, nur 3h Schlaf und am Case wollte ich auch weiter arbeiten.
Das ganze entgraten und reinigen hat mich den ganzen Sonntag gekostet und die Gosumodz Aliance Combs sehen immer noch besser aus :P .
Auf jeden fall kann ich nun endlcih mit der Verkabelung beginnen und muss dann nur noch alle Plexiglas Kanten polieren bzw Satinieren.
Wir haben ja am Montag schon wieder nen Feiertag, ich denke bis dahin werde ich gut voran kommen.



























")
") ?
?





















































 ja man sollte schon eine spezielle Stelle dafür haben die direkt dafür vorgesehen ist.
ja man sollte schon eine spezielle Stelle dafür haben die direkt dafür vorgesehen ist.