Und was für ein Motor ist verbaut? Also welchen Nennstrom hat der? Normalerweise nehme ich bei z.B. einem 1.7A Motor diese 1.7A als Peak an und rechnet deshalb auf Irms um (Wurzel 2) und dann nochmal grob 85% davon als Sicherheitsmarge. Damit komme ich dann bei 1V bzw. 1A Irms raus. Das passt meist ganz gut. Für schwächere Motoren nehme ich natürlich weniger, klar.
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.

Anmerkung: this_feature_currently_requires_accessing_site_using_safari
Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
[Sammelthread] Die HWLuxx 3D Druckerkolonne....
- Ersteller scars
- Erstellt am
toscdesign
Enthusiast
- Mitglied seit
- 17.02.2022
- Beiträge
- 6.865
- Details zu meinem Desktop
- Sonstiges
- 3D Drucker: Voron 2.4r2 350 / Bambulab A1 AMS
Sind noch die originalen Motoren von Anycubic, Typ konnte ich jetzt nicht finden.
Edit: Scheinen 1,7A Motoren zu sein, also passt das mit den 0,95
Edit 2:
Ist wohl wirklich ein Mechanik Problem.
Der Druck wurde kurz vorm Schluss abgebrochen und so sah das Filament im Extruder aus:

Ich weiß nicht ob man es erkennen kann, die Welle des Extruders steht schief:

Edit: Scheinen 1,7A Motoren zu sein, also passt das mit den 0,95
Edit 2:
Ist wohl wirklich ein Mechanik Problem.
Der Druck wurde kurz vorm Schluss abgebrochen und so sah das Filament im Extruder aus:
Ich weiß nicht ob man es erkennen kann, die Welle des Extruders steht schief:
Zuletzt bearbeitet:
Ich hatte den Titan ja früher auch. Wenn du die Schraube, die die zwei Hälften zusammenhält und durch das große Zahnrad geht, zu stark anziehst, dann klemmt das Zahnrad. Ziehst du sie zu locker an, dann dreht sie sich langsam raus. Deshalb hatte ich an der Schraube immer Schraubensicherung dran. Außerdem hatte ich PTFE Schmierstoff an der Spitze der Extruderwelle, damit der Spannhebel nicht so viel Widerstand bietet und ich hatte wie geschrieben oben im Spannhebel ein Stück PTFE drin, damit das Filament unbedingt mittig aufs Förderrad trifft. Und das Problem, das sich die Gehäusehälften verdrehen hatte ich auch.
Insgesamt war ich so dermaßen entnervt vom Titan (Aero), das ich nun einen Hemera benutze und fertig
Insgesamt war ich so dermaßen entnervt vom Titan (Aero), das ich nun einen Hemera benutze und fertig
toscdesign
Enthusiast
- Mitglied seit
- 17.02.2022
- Beiträge
- 6.865
- Details zu meinem Desktop
- Sonstiges
- 3D Drucker: Voron 2.4r2 350 / Bambulab A1 AMS
Das PTFE Stück ist drin. Durch das große Zahnrad geht keine Schraube.
Folgende Dinge habe ich festgestellt, geändert:
- Schraube (zur Befestigung am Motor) hinter der Zahnradwelle (großes Zahnrad) weggelassen, da es dort minimal schleift.
- Deckel leicht schräg montiert (soweit es ging) damit wurde die Welle des großen Zahnrades gerade ausgerichtet.
- Zahnrad auf der Motorwelle etwas höher als das große Zahnrad montiert, damit der Hebel über das Kugellager etwas vom großen Zahnrad weggedrückt wird.
Aktuell drucke ich mit TPU einen Dämpfer, welcher die Vibrationen des Motor-Extruder-Gespanns nicht mehr an das Portal des Druckers weitergeben sollte:


Folgende Dinge habe ich festgestellt, geändert:
- Schraube (zur Befestigung am Motor) hinter der Zahnradwelle (großes Zahnrad) weggelassen, da es dort minimal schleift.
- Deckel leicht schräg montiert (soweit es ging) damit wurde die Welle des großen Zahnrades gerade ausgerichtet.
- Zahnrad auf der Motorwelle etwas höher als das große Zahnrad montiert, damit der Hebel über das Kugellager etwas vom großen Zahnrad weggedrückt wird.
Aktuell drucke ich mit TPU einen Dämpfer, welcher die Vibrationen des Motor-Extruder-Gespanns nicht mehr an das Portal des Druckers weitergeben sollte:
Zuletzt bearbeitet:
toscdesign
Enthusiast
- Mitglied seit
- 17.02.2022
- Beiträge
- 6.865
- Details zu meinem Desktop
- Sonstiges
- 3D Drucker: Voron 2.4r2 350 / Bambulab A1 AMS
Nimm einen normalen Winkel und lege ihn schräg.Das taten wir früher im Werkstattunterricht.
Update:
Das Druckbett ist auf der linken Y Seite total verzogen. Wenn ich den Winkel auf beide Ecken lege hat das Blatt mittig darunter ca. 0,5mm Abstand zum Winkel 😯
Ich brauche wohl ein neu s Bett, eine Glasplatte zu biegen wird wohl nicht gehen, oder?

Ich muss dazu eine kurze Frage stellen.
Ist für so etwas nicht ABL (Automatic Bed Leveling) nicht genau das richtige?
Ist für so etwas nicht ABL (Automatic Bed Leveling) nicht genau das richtige?
Jap, das ist richtig. Wollte nur nochmal fragen, ob ich das System richtig verstanden habeJa, schon. Aber 0.5mm ist richtig viel bzw. zu viel. Man will die Unterseite des Drucks ja nicht wellig haben. Ich gebe mich mit maximal 0.2mm zufrieden.
toscdesign
Enthusiast
- Mitglied seit
- 17.02.2022
- Beiträge
- 6.865
- Details zu meinem Desktop
- Sonstiges
- 3D Drucker: Voron 2.4r2 350 / Bambulab A1 AMS
ABL habe ich bei meinem QQ-S Pro, ist schon geil!
So jetzt muss ich schauen, was ich mit dem i3 mache. Neues Bett wird wohl nötig sein. Wenn neu dir Ultrabase nicht so teuer wäre 😤
So folgendes muss ich "tauschen" bei meinem i3:
- Z- Spindeln, beide sind krumm
- Druckbett (am liebsten mit abnehmbarer Federstahlplatte)
Wenn ich das alles zusammen nehme, komme ich schon bei um so 100€ raus.
Da kann ich mir ja gleich einen neuen Drucker holen 🥲
So jetzt muss ich schauen, was ich mit dem i3 mache. Neues Bett wird wohl nötig sein. Wenn neu dir Ultrabase nicht so teuer wäre 😤
So folgendes muss ich "tauschen" bei meinem i3:
- Z- Spindeln, beide sind krumm
- Druckbett (am liebsten mit abnehmbarer Federstahlplatte)
Wenn ich das alles zusammen nehme, komme ich schon bei um so 100€ raus.
Da kann ich mir ja gleich einen neuen Drucker holen 🥲
Zuletzt bearbeitet:


Der BLTouch ist eben angekommen und nun kommen neue Fragen auf
Muss dafür die Firmware geändert werden bzw. etwas in der configuration.h?
Ich blicke da noch nicht so ganz durch. Bin eh noch nicht so weit den anzubauen, da ich noch den passenden Adapter konstruieren muss.
Muss dafür die Firmware geändert werden bzw. etwas in der configuration.h?
Ich blicke da noch nicht so ganz durch. Bin eh noch nicht so weit den anzubauen, da ich noch den passenden Adapter konstruieren muss.
Sony NEX-5T mit dem Kit Objektiv (16-50mm F3.5-F5.6) und entweder Photoscan/Metashape oder Reality Capture. Ich hatte auf beide Zugriff und kann mich schlicht nicht mehr erinnern. Von RC gibts auch eine Version, wo nur der Export Geld kostet (PPI Lizenz) und es gäbe ansonsten noch Meshroom, was bei mir ebenfalls brauchbare Ergebnisse erzielt hat.Womit habt ihr das denn gemacht?
An einem SLS Scanner bastel ich derzeit, es scheitert aber schlicht an der Software. Entweder nicht mehr verfügbar (HP 3D Scan) oder teuer (https://www.polyga.com/flexscan3d-software/)
Zuletzt bearbeitet:
toscdesign
Enthusiast
- Mitglied seit
- 17.02.2022
- Beiträge
- 6.865
- Details zu meinem Desktop
- Sonstiges
- 3D Drucker: Voron 2.4r2 350 / Bambulab A1 AMS
Update zum Extruder Vibrationsdämpfer:
Die erste Version war leider zu hart, da ich 4 Außenlinien gedruckt hatte.
Die Taschen für die Muttern haben super funktioniert, die habe ich bebehalten.
Für die zweite Version habe ich folgende Änderungen vorgenommen:
- den Extruder um 90° gedreht für die einfachere Filamenteinführung
- die Befestigung des Extruders auf 2 Zylinder reduziert um auch kleinste Vibrationen zu schlucken
- Außenlinien im Slicer auf 2 reduziert, für mehr Flexibilität an den Kanten.
Gedruckt wird wieder mit Eyrone TPU blau (Härte Shore 95A)
Sobald das Teil verbaut ist und wie vorgesehen funktioniert, bekommt ihr die Fotos.
Dann werde ich das Teil auch wieder auf Thingiverse hochladen, für alle mit Titan(Nachbau)-Extruder.


Update:
Das Teil ist Fertig und passt schon recht gut.
Hier und da könnte man noch optimieren 😅
https://www.thingiverse.com/thing:5258394





Update 23.02.22:
Hat nicht ganz so funktioniert wie geplant. Leider zu wabbelig und die Position ist Mist.
Was ich auch nicht wusste, das der Schrittmotor als Ausgleichsgewicht zum X--Achsenmotor verwendet wird.
Ich habe jetzt wieder die vorherige Version verbaut und teste.
Die erste Version war leider zu hart, da ich 4 Außenlinien gedruckt hatte.
Die Taschen für die Muttern haben super funktioniert, die habe ich bebehalten.
Für die zweite Version habe ich folgende Änderungen vorgenommen:
- den Extruder um 90° gedreht für die einfachere Filamenteinführung
- die Befestigung des Extruders auf 2 Zylinder reduziert um auch kleinste Vibrationen zu schlucken
- Außenlinien im Slicer auf 2 reduziert, für mehr Flexibilität an den Kanten.
Gedruckt wird wieder mit Eyrone TPU blau (Härte Shore 95A)
Sobald das Teil verbaut ist und wie vorgesehen funktioniert, bekommt ihr die Fotos.
Dann werde ich das Teil auch wieder auf Thingiverse hochladen, für alle mit Titan(Nachbau)-Extruder.
Update:
Das Teil ist Fertig und passt schon recht gut.
Hier und da könnte man noch optimieren 😅
https://www.thingiverse.com/thing:5258394
Update 23.02.22:
Hat nicht ganz so funktioniert wie geplant. Leider zu wabbelig und die Position ist Mist.
Was ich auch nicht wusste, das der Schrittmotor als Ausgleichsgewicht zum X--Achsenmotor verwendet wird.
Ich habe jetzt wieder die vorherige Version verbaut und teste.
Zuletzt bearbeitet:
Ich müsste diese Frage nochmal wiederholenDer BLTouch ist eben angekommen und nun kommen neue Fragen auf
Muss dafür die Firmware geändert werden bzw. etwas in der configuration.h?
Ich blicke da noch nicht so ganz durch. Bin eh noch nicht so weit den anzubauen, da ich noch den passenden Adapter konstruieren muss.
Ich will nicht unnötig an der Firmware rumfummeln, wenn es nicht nötig ist
Klar musst du die Firmware anpassen. Es gibt entweder in der configuration.h oder der configuration_adv.h eine #bltouch option, die du einschalten musst. Die nötige Verdrahtung hängt dann stark vom Board ab. Die Doku von Marlin ist aber eigentlich auch ganz gut dafür:
Hmpf..... ich hab es befürchtet
Geht das nur mitm PC oder auch mit dem RaspPI? Wenn es nur per PC geht, muss ich den Drucker nach oben schleppen und ich bin schon ein wenig faul
Geht das nur mitm PC oder auch mit dem RaspPI? Wenn es nur per PC geht, muss ich den Drucker nach oben schleppen und ich bin schon ein wenig faul
Irgendwie stehe ich gerade komplett aufm Schlauch :/
Kann es sein, dass bei TwoTrees die Datei gar nicht "configuration.h" heißt und ich "nur" diese Datei anpassen muss?
Diese schimpft sich nämlich "robin_nano35_cfg":
Wenn das reicht, wie komme ich denn an die aktuelle Datei? Ich habe einige Steps angepasst.
Oder muss man den Drucker erstmal mit Marlin flashen?
Kann es sein, dass bei TwoTrees die Datei gar nicht "configuration.h" heißt und ich "nur" diese Datei anpassen muss?
Diese schimpft sich nämlich "robin_nano35_cfg":
Code:
#===================高级功能设置=======================================
>cfg_insert_det_module 0 #接入断电检测模块(2:mks ups;1:mks 220det;0:mks pwc)
>cfg_have_ups_device 0 #机器是否配备UPS电源(1:是;0:否)
>cfg_print_over_auto_close 0 #打完关机配置(1:开启;0:关闭)。需搭配“打完关机模块”使用
>PRINT_FINISHED_COUNT 180 #打完关机延时时间(单位:秒)
>cfg_filament_det0_trigger_level 0 #E0断料检测接口的触发电平配置(1:高电平触发;0:低电平触发)
>cfg_filament_det1_trigger_level 0 #E1断料检测接口的触发电平配置(1:高电平触发;0:低电平触发)
>cfg_filament_load_length 100 #"换料"进料的长度
>cfg_filament_load_speed 800 #"换料"进料速度配置(mm/min)
>cfg_filament_load_limit_temperature 200 #"换料"进料最低限制温度配置
>cfg_filament_unload_length 100 #"换料"退料的长度
>cfg_filament_unload_speed 800 #"换料"退料速度配置(mm/min)
>cfg_filament_unload_limit_temperature 200 #"换料"退料最低限制温度配置
#=========================== 调平按钮配置 =============================
>cfg_leveling_mode 0 #调平模式配置《1:自动调平;0:手动调平》
#=========================== 手动调平 ==================================
>cfg_point_number 5 #手动调平的个数:(可设3,4,5个点)
>cfg_point1:50,50
>cfg_point2:280,50
>cfg_point3:280,280 #手动调平时的5个点的位置坐标
>cfg_point4:50,280
>cfg_point5:150,150
#========================== 自动调平 ===================================
>cfg_auto_leveling_cmd:G28;G29;
#===================语言设置==========================================
>cfg_language_adjust_type 1 #语言切换方式配置(1:屏幕按钮切换语言,0:配置文件选项切换语言).
>cfg_language_type 2 #语言(1:简体中文;2:繁体中文;3:英文;4:俄语;5:西班牙语,6:法语,7:意大利语),
#此配置只有在cfg_multiple_language设置为0时有效.
#==================自定义功能按钮定制=================================
#设置界面自定义功能1
>setmenu_func1_display 1 #1:显示按钮,0:不显示按钮
#每条指令必须用分号";"隔开
>setmenu_func1:M84;
>moreitem_pic_cnt 7 #"更多"按钮数量
#按钮1~按钮7定制指令
#每条指令必须用分号";"隔开
#每个按钮设置指令最大必须小于200字节
>moreitem_button1_cmd:G28 X0;G28 Y0;G28 Z0;
>moreitem_button2_cmd:G28 X0;G28 Y0;G28 Z0;
>moreitem_button3_cmd:G28 X0;G28 Y0;G28 Z0;
>moreitem_button4_cmd:G28 X0;G28 Y0;G28 Z0;
>moreitem_button5_cmd:G28 X0;G28 Y0;G28 Z0;
>moreitem_button6_cmd:G28 X0;G28 Y0;G28 Z0;
>moreitem_button7_cmd:G28 X0;G28 Y0;G28 Z0;
#打印界面"更多"按钮数量
>morefunc_cnt 7
#按钮1~按钮6功能配置
>morefunc1_cmd:G28;
>morefunc2_cmd:G28;
>morefunc3_cmd:G28;
>morefunc4_cmd:G28;
>morefunc5_cmd:G28;
>morefunc6_cmd:G28;
>morefunc7_cmd:G28;
#-------------------------------------------------------------
######## 显示效果定制(按键与LOGO定制请看说明书) ##########
>cfg_background_color 0x1A1A1A #屏幕背景色
>cfg_title_color 0xFFFFFF #标题文字
>cfg_btn_bkcolor 0x1A1A1A #通用按钮背景色
>cfg_btn_textcolor 0xFFFFFF #通用按钮文字颜色
>cfg_back_btn_bkcolor 0xff5449 #"返回"键背景色
>cfg_back_btn_textcolor 0xFFFFFF #"返回"键字体颜色
>cfg_dialog_btn_bkcolor 0xff5449 #对话框按钮背景色
>cfg_dialog_btn_textcolor 0xFFFFFF #对话框按钮字体颜色
>cfg_btn_text_offset 15 #按钮字体偏移底边位置(单位:像素)
>cfg_screen_display_mode 1 #屏幕首页显示模式(0:经典模式,1:简约模式,2:复古模式)
>cfg_screen_overturn_180 0xEE #屏幕翻转180°(0x00:不翻转,0xEE:翻转)
#============================= 基本设置 =========================
>MACHINETPYE 2 #机型设置,0:Cartesian; 1:DELTA ; 2:COREXY
>HAS_TEMP_BED 1 #开启热床(1:开启,0:禁止)
>EXTRUDERS 1 #配置挤出头数量
#====2进1出设置====
>SINGLE_NOZZLE 0 #(0:不支持;1:支持)
>Z2_STEPPER_DRIVERS 1 #使能双Z功能, 1:开启; 0:禁止;
>Z2_ENDSTOPS 0 #使能Z轴双限位; 0:禁用; 1:启用;
>Z2_USE_ENDSTOP 0 #Z轴第二个限位接口; 0:不使用; 1:Z_MAX; 2:Z_MIN
# XYZ轴的行程 (单位:mm)
>X_MIN_POS 0
>Y_MIN_POS 0
>Z_MIN_POS 0
>X_MAX_POS 300
>Y_MAX_POS 300
>Z_MAX_POS 350
# 暂停后挤出头停止位置,XY设置为-1时XY轴不移动
>FILAMENT_CHANGE_X_POS 5 # X位置(绝对坐标值)
>FILAMENT_CHANGE_Y_POS 5 # Y位置(绝对坐标值)
>FILAMENT_CHANGE_Z_ADD 5 # Z位置(相对坐标值)
#使用双头时,第二个挤出头与第一个挤出的XY偏移值(第二个挤出头靠近限位).
>HOTEND_OFFSET_X -20.00 #x轴偏移(单位:mm)
>HOTEND_OFFSET_Y -5.00 #y轴偏移(单位:mm)
#============================== 步进电机设置 ============================
#电机方向配置.
>INVERT_X_DIR 1
>INVERT_Y_DIR 1
>INVERT_Z_DIR 1
>INVERT_E0_DIR 1
>INVERT_E1_DIR 1
#移动参数设置
>DEFAULT_X_STEPS_PER_UNIT 160 #X轴默认脉冲 (steps/mm)
>DEFAULT_Y_STEPS_PER_UNIT 160 #Y轴默认脉冲 (steps/mm)
>DEFAULT_Z_STEPS_PER_UNIT 800 #Z轴默认脉冲 (steps/mm)
>DEFAULT_E0_STEPS_PER_UNIT 805 #E轴默认脉冲 (steps/mm)
>DEFAULT_E1_STEPS_PER_UNIT 800 #E轴默认脉冲 (steps/mm)
>DEFAULT_X_MAX_FEEDRATE 200 #X轴默认速度 (mm/s)
>DEFAULT_Y_MAX_FEEDRATE 200 #Y轴默认速度 (mm/s)
>DEFAULT_Z_MAX_FEEDRATE 4 #Z轴默认速度 (mm/s)
>DEFAULT_E0_MAX_FEEDRATE 70 #E轴默认速度 (mm/s)
>DEFAULT_E1_MAX_FEEDRATE 70 #E轴默认速度 (mm/s)
>DEFAULT_X_MAX_ACCELERATION 1000 #X轴默认最大加速度 (change/s) change = mm/s
>DEFAULT_Y_MAX_ACCELERATION 1000 #Y轴默认最大加速度 (change/s) change = mm/s
>DEFAULT_Z_MAX_ACCELERATION 100 #Z轴默认最大加速度 (change/s) change = mm/s
>DEFAULT_E0_MAX_ACCELERATION 1000 #E轴默认最大加速度 (change/s) change = mm/s
>DEFAULT_E1_MAX_ACCELERATION 1000 #E轴默认最大加速度 (change/s) change = mm/s
>DEFAULT_ACCELERATION 1000 #X,Y,Z,E 打印时的默认加速度
>DEFAULT_RETRACT_ACCELERATION 1000 #X,Y,Z,E 回抽默认加速度
>DEFAULT_TRAVEL_ACCELERATION 1000 #X,Y,Z 非打印时的默认加速度
>DEFAULT_MINIMUMFEEDRATE 0.0 #默认最小速度
>DEFAULT_MINSEGMENTTIME 20000 #缓存空时,一个移动所需的最小时间(单位ms).
>DEFAULT_MINTRAVELFEEDRATE 0.0 #
>DEFAULT_XJERK 20.0 #默认X轴 Jerk (mm/s)
>DEFAULT_YJERK 20.0 #默认Y轴 Jerk (mm/s)
>DEFAULT_ZJERK 0.4 #默认Z轴 Jerk (mm/s)
>DEFAULT_EJERK 5.0 #默认E轴 Jerk (mm/s)
#For Inverting Stepper Enable Pins (0:Low,1:High)
>X_ENABLE_ON 0
>Y_ENABLE_ON 0
>Z_ENABLE_ON 0
>E_ENABLE_ON 0
>PULSE_DELAY 5 #脉冲保持时间(单位:机器周期)
#============================= 热敏设置 ============================
>TEMP_SENSOR_0 1 #1: 100k热敏;-3 : MAX31855热电偶
>EXTRUDE_MINTEMP 170 #打印时,挤出机最低温度(起保护作用)
>HEATER_0_MINTEMP 5 #挤出0最小温度值
>HEATER_0_MAXTEMP 275 #挤出0最大温度值
>HEATER_1_MINTEMP 5 #挤出1最小温度值
>HEATER_1_MAXTEMP 275 #挤出1最大温度值
>BED_MAXTEMP 150 #热床最大温度值
>BED_MINTEMP 5 #热床最小温度值
#======================== 热敏保护配置 =======================
>THERMAL_PROTECTION_PERIOD 120 #单位:秒;当机器频繁出现Err7时,可适当加大当前值;
>THERMAL_PROTECTION_HYSTERESIS 5 #单位:℃
>WATCH_TEMP_PERIOD 120 #单位:秒;当机器频繁出现Err5时,可适当加大当前值
>WATCH_TEMP_INCREASE 2 #单位:℃
>THERMAL_PROTECTION_BED_PERIOD 120 #单位:秒;当机器频繁出现Err7时,可适当加大当前值
>THERMAL_PROTECTION_BED_HYSTERESIS 5 #单位:℃
>WATCH_BED_TEMP_PERIOD 120 #单位:秒;当机器频繁出现Err6时,可适当加大当前值
>WATCH_BED_TEMP_INCREASE 2 #单位:℃
# 挤出头温度调控参数设置.
>PIDTEMPE 1 # 模式选择,1:PID; 0:bang-bang
>DEFAULT_Kp 22.2 # P值设置
>DEFAULT_Ki 1.08 # I值设置
>DEFAULT_Kd 114 # D值设置
#热床温度调控参数设置..
>PIDTEMPBED 0 # 模式选择,1:PID; 0:bang-bang
>DEFAULT_bedKp 10.00 # P值设置
>DEFAULT_bedKi 0.023 # I值设置
>DEFAULT_bedKd 305.4 # D值设置
#============================== 限位开关设置 ===========================
>MIN_SOFTWARE_ENDSTOPS 1 # 0:禁止软限位; 1:开启软限位.
>MAX_SOFTWARE_ENDSTOPS 1 # 0:禁止软限位; 1:开启软限位.
# 配置限位开关的接入信号.
>X_MIN_ENDSTOP_INVERTING 1 # X_MIN限位开关常开/常闭选择
>Y_MIN_ENDSTOP_INVERTING 0 # Y_MIN限位开关常开/常闭选择
>Z_MIN_ENDSTOP_INVERTING 1 # Z_MIN限位开关常开/常闭选择
>X_MAX_ENDSTOP_INVERTING 0 # X_MAX限位开关常开/常闭选择
>Y_MAX_ENDSTOP_INVERTING 1 # Y_MAX限位开关常开/常闭选择
>Z_MAX_ENDSTOP_INVERTING 1 # Z_MAX限位开关常开/常闭选择
>Z_MIN_PROBE_ENDSTOP_INVERTING 1 # Z_PROBE限位开关常开/常闭设置.
# 指明限位开关或探针的使用接口.
>USE_XMIN_PLUG 1 # 1:使用; 0:不使用
>USE_YMIN_PLUG 0 # 1:使用; 0:不使用
>USE_ZMIN_PLUG 1 # 1:使用; 0:不使用
>USE_XMAX_PLUG 0 # 1:使用; 0:不使用
>USE_YMAX_PLUG 1 # 1:使用; 0:不使用
>USE_ZMAX_PLUG 1 # 1:使用; 0:不使用
#============================== 回零设置 ==============================
>X_HOME_DIR -1 # X轴回零方向; 1=MAX方向, -1=MIN方向 :[-1,1]
>Y_HOME_DIR 1 # Y轴回零方向; 1=MAX方向, -1=MIN方向 :[-1,1]
>Z_HOME_DIR -1 # Z轴回零方向; 1=MAX方向, -1=MIN方向 :[-1,1]
>HOMING_FEEDRATE_XY 2400 # XY轴回零速度 (mm/m)
>HOMING_FEEDRATE_Z 600 # Z轴回零速度 (mm/m)
>HOME_Y_BEFORE_X 0 # 回零时xy轴的顺序,0: X先回零; 1:Y先回零;
#============================= Z轴探针设置 =============================
#探针接口Z-Min或Z-Max.
>Z_MIN_PROBE_PIN_MODE 0 # 0:不使用; 1:接Z_MIN; 2:接ZMAX
>BLTOUCH 0 # 0:禁用BLTOUCH; 1:启用BLTOUCH
>Z_PROBE_OFFSET_FROM_EXTRUDER 0 # Z 偏移: -below +above [the nozzle]
>X_PROBE_OFFSET_FROM_EXTRUDER 0 # X 偏移: -left +right [of the nozzle]
>Y_PROBE_OFFSET_FROM_EXTRUDER 0 # Y 偏移: -front +behind [the nozzle]
>XY_PROBE_SPEED 4000 # 探针XY轴移动速度 (mm/m)
>Z_PROBE_SPEED_FAST 600 # Speed for the first approach when double-probing (with PROBE_DOUBLE_TOUCH)
>Z_PROBE_SPEED_SLOW 300 # Speed for the "accurate" probe of each point
>Z_SAFE_HOMING 1 # 0:不使能,1:使能,避免回零时探针在热床
#=============================== 热床调平设置 ==============================
>BED_LEVELING_METHOD 5 # 0:不使用调平; 3:多点自动调平; 5:手动网格调平
>GRID_MAX_POINTS_X 3 # x轴方式调平点数. <= 15
>GRID_MAX_POINTS_Y 3 # y轴方向调平点数. <= 15
>Z_CLEARANCE_DEPLOY_PROBE 20 # Z轴抬起/放下的距离.> 0
>Z_CLEARANCE_BETWEEN_PROBES 20 # Z轴在两个调平点的的移动高度. > 0
# 设置探针能够到达热床的边界距离.
>LEFT_PROBE_BED_POSITION 30
>RIGHT_PROBE_BED_POSITION 180
>FRONT_PROBE_BED_POSITION 30
>BACK_PROBE_BED_POSITION 180
>MESH_INSET 20 # MESH_BED_LEVELING调平模式下边界距离范围
#============================== Delta机型设置 =============================
>DELTA_SEGMENTS_PER_SECOND 40 #--default
>DELTA_DIAGONAL_ROD 346.75 #Center-to-center distance of the holes in the diagonal push rods.
>DELTA_SMOOTH_ROD_OFFSET 211.5 #Horizontal offset from middle of printer to smooth rod center.
>DELTA_EFFECTOR_OFFSET 28 #Horizontal offset of the universal joints on the end effector.
>DELTA_CARRIAGE_OFFSET 14.5 #Horizontal offset of the universal joints on the carriages.
>DELTA_RADIUS 169 #Horizontal distance bridged by diagonal push rods when effector is centered.
>DELTA_HEIGHT 302 #height from z=0.00 to home position
>DELTA_PRINTABLE_RADIUS 125 #Print surface diameter/2 minus unreachable space (avoid collisions with vertical towers).
>DELTA_CALIBRATION_RADIUS 100 #set the radius for the calibration probe points - max 0.8 * DELTA_PRINTABLE_RADIUS
#============================== Wifi 设置 =============================
>CFG_WIFI_MODE 0 #wifi 模式(0:sta;1:ap)
>CFG_WIFI_AP_NAME WiFitest #wifi 名称
>CFG_WIFI_KEY_CODE makerbase #wifi 密码
>CFG_CLOUD_ENABLE 0 #云服务使能(1:使能,0:禁止)
>CFG_WIFI_CLOUD_HOST www.baizhongyun.cn #云服务链接
>CFG_CLOUD_PORT 10086 #云服务端口
>WISI_LIST_SCAN 1 #是否使用wifi列表扫描(1:使用,0:禁止)
#不显示wifi按钮 0:显示WiFi按钮 1:不显示
>DISABLE_WIFI 0
#关于信息
>about_type:Robin_nano v1.3
>about_version:B03-V2.0.3.5-11029
>about_company:
>about_email:
#暂停/恢复挤出量配置(单位:mm)
>PAUSE_UNLOAD_LEN -3
>RESUME_LOAD_LEN 10
#暂停/恢复挤出增加百分比,为0时该项不起作用(单位:%)
>RESUME_SPEED 80
#唤醒模式配置
>cfg_Standby_mode 0 #是否开启唤醒功能(0:关闭,1:开启)
>cfg_Standby_gap_time 600 #设置进入休眠时间(单位:秒)
>MACHINE_PARAMETER 1 #是否使用在线调参功能(0:不使用,1:使用)
#end.Wenn das reicht, wie komme ich denn an die aktuelle Datei? Ich habe einige Steps angepasst.
Oder muss man den Drucker erstmal mit Marlin flashen?
Weil in der Config folgendes steht:Der Quote sieht nach einer Konfig für einen Touchscreen aus, kann das sein?
Code:
#============================= Z轴探针设置 =============================
#探针接口Z-Min或Z-Max.
>Z_MIN_PROBE_PIN_MODE 0 # 0:不使用; 1:接Z_MIN; 2:接ZMAX
>BLTOUCH 0 # 0:禁用BLTOUCH; 1:启用BLTOUCH
>Z_PROBE_OFFSET_FROM_EXTRUDER 0 # Z 偏移: -below +above [the nozzle]
>X_PROBE_OFFSET_FROM_EXTRUDER 0 # X 偏移: -left +right [of the nozzle]
>Y_PROBE_OFFSET_FROM_EXTRUDER 0 # Y 偏移: -front +behind [the nozzle]
>XY_PROBE_SPEED 4000 # 探针XY轴移动速度 (mm/m)
>Z_PROBE_SPEED_FAST 600 # Speed for the first approach when double-probing (with PROBE_DOUBLE_TOUCH)
>Z_PROBE_SPEED_SLOW 300 # Speed for the "accurate" probe of each point
>Z_SAFE_HOMING 1 # 0:不使能,1:使能,避免回零时探针在热床Deswegen bin ich darauf gekommen.
Ist das so ohne weiteres möglich? Ich lese mich zwar in allem ein, aber hab noch echt viele Lücken.Und wenn du eh schon am flashen bist und ein Rpi am Drucker hängt... Mal über Klipper nachgedacht?
Ohne weiteres ist immer so ne Sache. Also grundsätzlich kann man (fast) jeden Drucker auf Klipper umstellen sofern man möchte. Wenns ne Beispielkonfig gibt, dann ist das flott passiert. Der Hauptunterschied zu Octoprint + Marlin ist, das Klipper sowohl auf dem Rpi als auch dem Druckerboard läuft. Die Installation läuft immer gleich: man installiert Klipper auf dem Rpi, entweder als fertiges Image (z.B. MainsailOS), komplett via SSH "zu Fuß" oder man nutzt KIAUH, das ist eine kleine Skriptsammlung, die einem das Leben leichter macht. Danach muss das Druckerboard geflasht werden und Klipper mit der Konfigurationsdatei (printer.cfg) gefüttert werden. Kalibrieren muss man natürlich auch ein paar Sachen, aber im großen und ganzen wars das. So Ding wie einen BL Touch kann man nachträglich locker einrichten, weil dafür lediglich Änderungen in der printer.cfg gemacht werden, ohne neu zu flashen.
Marlin und Klipper haben beide ihre Vor und Nachteile, ist irgendwo auch eine Geschmacksfrage. Für mich überwiegen die Vorteile von Klipper ganz klar, deshalb nutze ich es mittlerweile fast 3 Jahre.
Marlin und Klipper haben beide ihre Vor und Nachteile, ist irgendwo auch eine Geschmacksfrage. Für mich überwiegen die Vorteile von Klipper ganz klar, deshalb nutze ich es mittlerweile fast 3 Jahre.
Dann würde ich erstmal bei Marlin bleiben. Ich bin ja noch in der Lernphase
Dennoch bleibt noch die Frage offen wie ich den BLTouch aktivieren muss.
Evtl. kann mir @Gamer1969 ein wenig dabei helfen, da er auch ein TwoTrees hat.
Dennoch bleibt noch die Frage offen wie ich den BLTouch aktivieren muss.
Evtl. kann mir @Gamer1969 ein wenig dabei helfen, da er auch ein TwoTrees hat.
Gamer1969
Enthusiast
- Mitglied seit
- 14.03.2017
- Beiträge
- 2.218
- Desktop System
- AMD-7-5700X3D
- Details zu meinem Desktop
- Prozessor
- AMD Ryzen 7 5700X3D + Kombo Strike 3 + RAM OC
- Mainboard
- MSI B 550 UNIFY - X
- Kühler
- MPG CORELIQUID K360 V2
- Speicher
- LC-Power RGB 32GB 3200 MHz @ 3600 MHz OC
- Grafikprozessor
- MSI RX 6700 XT Gaming X 12G
- Display
- iiyama G-Master GB2760QSU-B1 Red Eagle, 27"
- SSD
- 4 x M.2 NVMe und 1 x 2,5" SATA
- HDD
- Nie wieder!
- Opt. Laufwerk
- Externer ASUS Brenner
- Soundkarte
- Onboard / MSI IMMERSIVE GH50 USB
- Gehäuse
- MSI MPG VELOX 100P AIRFLOW
- Netzteil
- MSI MPG A750GF 750W ATX 2.4
- Keyboard
- MSI Vigor GK71 Sonic RED, USB, DE
- Mouse
- MSI Clutch GM50 Gaming Mouse USB
- Betriebssystem
- Windows 11 Home
- Webbrowser
- Opera
- Sonstiges
- 3D Drucker: Two Trees Sapphire PRO, TRONXY X5SA PRO / Handy: DOOGEE V20 Pro
- Internet
- ▼25,85 Mbps ▲4,97 Mbps
Schau mal auf den Motor, da müsste eine Nummer draufstehen.Sind noch die originalen Motoren von Anycubic, Typ konnte ich jetzt nicht finden.
Diese kannst du dann Google suchen lassen, da es ja nicht so viele Motorhersteller gibt, alle bauen ja für viele und die benennen die Teile um.
z.B. TwoTrees ist der Hersteller der Motoren ja Usongshine.
Beitrag automatisch zusammengeführt:
Hast du dieses Video mal angeschaut?Evtl. kann mir @Gamer1969 ein wenig dabei helfen, da er auch ein TwoTrees hat.
Da wird Marlin gut erklärt.
Datenschutzhinweis für Youtube
An dieser Stelle möchten wir Ihnen ein Youtube-Video zeigen. Ihre Daten zu schützen, liegt uns aber am Herzen: Youtube setzt durch das Einbinden und Abspielen Cookies auf ihrem Rechner, mit welchen sie eventuell getracked werden können. Wenn Sie dies zulassen möchten, klicken Sie einfach auf den Play-Button. Das Video wird anschließend geladen und danach abgespielt.
Youtube Videos ab jetzt direkt anzeigen
Auch solltest du dir dieses Programm runterladen, damit ändere ich alle .cfg Dateien und auch andere Dateien.
Downloads | Notepad++
Version: v8.2.1
Das Programm kannst du bei Installation so verknüpfen.
.bin Dateien kann man nur in VSCode richtig anschauen und ändern.
Wie man den BL Touch anschließt ist hier gut erklärt.
Hier wird
Datenschutzhinweis für Youtube
An dieser Stelle möchten wir Ihnen ein Youtube-Video zeigen. Ihre Daten zu schützen, liegt uns aber am Herzen: Youtube setzt durch das Einbinden und Abspielen Cookies auf ihrem Rechner, mit welchen sie eventuell getracked werden können. Wenn Sie dies zulassen möchten, klicken Sie einfach auf den Play-Button. Das Video wird anschließend geladen und danach abgespielt.
Youtube Videos ab jetzt direkt anzeigen
Anhänge
Zuletzt bearbeitet:
@Gamer1969
Danke schonmal!
Aktuell schaue ich mir dieses Marlin an, da diese schon für die Sapphire Pro/Plus gemacht ist.
Aber ich verstehe dabei folgenden Punkt nicht:
Mein Drucker hat zwei Z-Motoren die mit einem Riemen verbunden sind. Des Weiteren hat er einen Endschalter. Gekauft vor ein paar Wochen.

Irgendwie doppelt
Danke schonmal!
Das Video kenne ich. Aber aktiviert das auch richtiges ABL oder nur leveling?Wie man den BL Touch anschließt ist hier gut erklärt.
Hier wird NICHTS über Marlin oder .cfg eingestellt! ALLES über das Display, was ich schon genial finde.
Aktuell schaue ich mir dieses Marlin an, da diese schon für die Sapphire Pro/Plus gemacht ist.
Aber ich verstehe dabei folgenden Punkt nicht:
Sprich "Sapphire Plus (Dual-Z and belt-synced versions)" und in der Configuration.h steht folgendesPreconfigured printers:
- Sapphire Pro
- Sapphire Plus (Dual-Z and belt-synced versions)
- Bluer
- Sapphire Pro/Plus with E3D Hemera
Wie finde ich jetzt heraus was ich für einen Plus habe?// Core XY
//#define SAPPHIRE_PRO
//#define SAPPHIRE_PLUS
//#define SAPPHIRE_PLUS_DUAL_Z //==> Read text since additional config is mandatory
/****************************************************************************
Attention: On newer Sapphire Plus models (Probably manufactured after April 2020)
the Z-Axis drives and endstopps have been changed to dual Z-Endstopps and
non-belt-synced drives. In this case, a additional configuration has to be done
!!!Configuration_adv.h (Uncomment Line 39)!!!
Mein Drucker hat zwei Z-Motoren die mit einem Riemen verbunden sind. Des Weiteren hat er einen Endschalter. Gekauft vor ein paar Wochen.
Irgendwie doppelt
Gamer1969
Enthusiast
- Mitglied seit
- 14.03.2017
- Beiträge
- 2.218
- Desktop System
- AMD-7-5700X3D
- Details zu meinem Desktop
- Prozessor
- AMD Ryzen 7 5700X3D + Kombo Strike 3 + RAM OC
- Mainboard
- MSI B 550 UNIFY - X
- Kühler
- MPG CORELIQUID K360 V2
- Speicher
- LC-Power RGB 32GB 3200 MHz @ 3600 MHz OC
- Grafikprozessor
- MSI RX 6700 XT Gaming X 12G
- Display
- iiyama G-Master GB2760QSU-B1 Red Eagle, 27"
- SSD
- 4 x M.2 NVMe und 1 x 2,5" SATA
- HDD
- Nie wieder!
- Opt. Laufwerk
- Externer ASUS Brenner
- Soundkarte
- Onboard / MSI IMMERSIVE GH50 USB
- Gehäuse
- MSI MPG VELOX 100P AIRFLOW
- Netzteil
- MSI MPG A750GF 750W ATX 2.4
- Keyboard
- MSI Vigor GK71 Sonic RED, USB, DE
- Mouse
- MSI Clutch GM50 Gaming Mouse USB
- Betriebssystem
- Windows 11 Home
- Webbrowser
- Opera
- Sonstiges
- 3D Drucker: Two Trees Sapphire PRO, TRONXY X5SA PRO / Handy: DOOGEE V20 Pro
- Internet
- ▼25,85 Mbps ▲4,97 Mbps
Du wirst wohl noch einen älteren Drucker erworben haben, denn dieser Riemen ist bei den neueren Modellen nicht vorhanden UND die haben 2 Z Endstops!Wie finde ich jetzt heraus was ich für einen Plus habe?
Aber kannst die folgenden Fragen ja mal durchgehen.
Hier mal das Video Anschauen ab Minute 26, da siehst du wie die Treiber verbaut sind, das ist schon ein neueres Modell.
Das Video ist 1 Jahr alt und dort ist kein Riemen mehr verbaut.
1. Hast du oben über dem Board eine "Wartungsklappe"?
2. Was für ein Board ist genau verbaut?
3. Sind die Motoren einzeln mit je einem Treiber versehen?
Sind bei der Grünen Markierung in dem Anschluss die beiden Motoren als Y Verbindung drin und werden über EINEN Treiber betrieben, musst du bei der configuration_adv.h nachschauen ob dort die Linie 39 aus kommentiert ( // ) ist.
Da du ja einen BL Touch verbaust, wäre es nicht schlecht auch auch für beide Motoren einen Treiber zu verwenden und den zweiten Motor aus den Anschluss E 1 zu legen.
Dafür muss der Anschluss für einen Z Motor konfiguriert werden und auch ein eigenes Kabel auf E 1 bekommen.
Ist vielleicht ein wenig komplizierter aber so spart man sich den Riemen zwischen den beiden Motoren, ist aber auch mit einem Nachteil verbunden, da die Seiten des Bettes jatzt OHNE Verbindung der Z Achsen unterschiedlich absacken können wenn der Strom abgeschaltet ist.
Beitrag automatisch zusammengeführt:
P.S. bei meinem Monster, dem TRONXY habe ich die Motoren auch mit einem Riemen "synchronisiert", das Bett hat sich immer einseitig leicht abwärts bewegt.
Da musste man immer nach dem einschalten fast neu leveln, jetzt ist da Ruhe angesagt.
Der Anhang fehltHier mal das Video Anschauen ab Minute 26, da siehst du wie die Treiber verbaut sind, das ist schon ein neueres Modell.
Das Video ist 1 Jahr alt und dort ist kein Riemen mehr verbaut.
")
Ja, die habe ich. Ich kann von oben alles am Board machen.1. Hast du oben über dem Board eine "Wartungsklappe"?
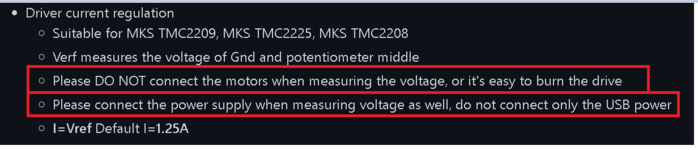
Ich habe das MKS Robin Nano V1.32. Was für ein Board ist genau verbaut?
Alle Treiber (5 Stück) sind MKS TMC2225 V1.03. Sind die Motoren einzeln mit je einem Treiber versehen?
Nein, Es ist jeder Motor einzeln angeschlossen.Sind bei der Grünen Markierung in dem Anschluss die beiden Motoren als Y Verbindung drin und werden über EINEN Treiber betrieben, musst du bei der configuration_adv.h nachschauen ob dort die Linie 39 aus kommentiert ( // ) ist.


Gamer1969
Enthusiast
- Mitglied seit
- 14.03.2017
- Beiträge
- 2.218
- Desktop System
- AMD-7-5700X3D
- Details zu meinem Desktop
- Prozessor
- AMD Ryzen 7 5700X3D + Kombo Strike 3 + RAM OC
- Mainboard
- MSI B 550 UNIFY - X
- Kühler
- MPG CORELIQUID K360 V2
- Speicher
- LC-Power RGB 32GB 3200 MHz @ 3600 MHz OC
- Grafikprozessor
- MSI RX 6700 XT Gaming X 12G
- Display
- iiyama G-Master GB2760QSU-B1 Red Eagle, 27"
- SSD
- 4 x M.2 NVMe und 1 x 2,5" SATA
- HDD
- Nie wieder!
- Opt. Laufwerk
- Externer ASUS Brenner
- Soundkarte
- Onboard / MSI IMMERSIVE GH50 USB
- Gehäuse
- MSI MPG VELOX 100P AIRFLOW
- Netzteil
- MSI MPG A750GF 750W ATX 2.4
- Keyboard
- MSI Vigor GK71 Sonic RED, USB, DE
- Mouse
- MSI Clutch GM50 Gaming Mouse USB
- Betriebssystem
- Windows 11 Home
- Webbrowser
- Opera
- Sonstiges
- 3D Drucker: Two Trees Sapphire PRO, TRONXY X5SA PRO / Handy: DOOGEE V20 Pro
- Internet
- ▼25,85 Mbps ▲4,97 Mbps
Der Anhang fehlt
Datenschutzhinweis für Youtube
An dieser Stelle möchten wir Ihnen ein Youtube-Video zeigen. Ihre Daten zu schützen, liegt uns aber am Herzen: Youtube setzt durch das Einbinden und Abspielen Cookies auf ihrem Rechner, mit welchen sie eventuell getracked werden können. Wenn Sie dies zulassen möchten, klicken Sie einfach auf den Play-Button. Das Video wird anschließend geladen und danach abgespielt.
Youtube Videos ab jetzt direkt anzeigen
Ja, die habe ich. Ich kann von oben alles am Board machen.
Ich habe das MKS Robin Nano V1.3
Alle Treiber (5 Stück) sind MKS TMC2225 V1.0
Du hast ja die aktuellste Version von dem Drucker, also müsstest du diese Firmware installieren:Nein, Es ist jeder Motor einzeln angeschlossen.

Download - Two Trees
Download corresponding firmware for your Twotrees 3D printers, laser engravers & cutters. Click to find right version for your DIY 3D printing
 twotrees3d.com
twotrees3d.com
Dann müsstest du nur noch alles so anschließen und einstellen wie im verlinkten Video von MKS.
Hier von 0 auf 1 wechseln oder in der Firmware über Display anpassen.
Auch nicht vergessen den Offset vom BL Touch angeben!