Ich hatte ja auch nach einem leichteren Motor gesucht, aber da muss man sehr aufpassen wie die Verkabelung ist und einige geben da leider nichts an.
Wer mehr über Treiber und andere Dinge wissen möchte, der sollte diese Seite mal anschauen:
FYSETC product documentation

wiki.fysetc.com
Diesen Motor habe ich verbaut:
Der hat die gleiche Anschlussbelegung wie die Originalen Motoren: Man braucht keine Kabel wechseln!
Bei mir ist die Farbreihenfolge: (1/A)Blau - (3/B)Grün - (4/C)Rot - (6/D)Schwarz ( ACHTNG beim Stepperanschluss kontrollieren! )
NEMA 17 PANCAKE: Original verbaute Motoren von TwoTrees:
Es gibt ja noch andere Motoren, z.B.:
STEPPERONLINE Runden Nema 14 Bipolar 0.9deg 7Ncm 0.5A Φ36x12mm 4 Drähte für CNC Graviermaschine,3D Drucker : Amazon.de: Gewerbe, Industrie & Wissenschaft
www.amazon.de
TOOGOO 17Hs08-1004S 4-Lead Nema 17 Schritt Motor 20 Mm 1A 13 Ncm (18,4 Unzen In) 42 Motor Nema17 Schritt für Diy 3D Drucker Cnc Xyz : Amazon.de: Gewerbe, Industrie & Wissenschaft
www.amazon.de
Wie man an den Beispielen sieht hat jeder Hersteller eine andere Belegung bei den Farben, ABER da diese Kabel ja von den Stepper Drivern kommen sollte man da genau drauf achten.
Vielleicht hilft das ja dem einen oder anderen wenn die Motoren ach dem Anschluss ungewöhnliche Geräusche machen oder sich ungewöhnlich verhalten.
Da sollte man die PIN Belegung überprüfen!
ACHTUNG SEHR WICHTIG!
Welcher Treiber ist verbaut?
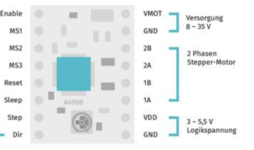
Viele 3D Drucker haben noch diese Treiber verbaut: A 4988
Hier mal ein Hinweis von
@Tzk:
Zu den A4988 und den DRV8825 sei noch gesagt das es verschiedene Varianten mit verschiedener Bestückung gibt. Das Problem daran ist, das die Vref damit teilweise deutlich abweicht... Ich hab Exemplare hier die 0.8V Vref brauchen, dann welche die mit 0.4V laufen und solche die (iirc) 0.2V benötigen. Je nach verlötetem Vorwiderstand.
Hier sollte man dann die Anschlussbelegung überprüfen, also welche Farbe geht an welchen Anschlusspin auf dem Board.
Bei den A 4988 Treiber steht die PIN Belegung immer von unten bei den PINs ( kann auch andere Treiber betreffen ).
AUCHTUND IMMER AUF DEN DIR PIN ACHTEN, vor allem beim Einbau der Treiber!
Sonst zeigen die Teile den falschen Einbau durch RAUCHZEICHEN an!
TMC 2208
TMC 2209
TMC 2225
Genaues Messen der Vref Spannung:
Bei diesen Messpunkten hat man einen geringeren Widerstand zu bedenken als wenn man die Masse beim Anschluss der Versorgungsleitung des Boards benutzt.
Wird zwar nur ein sehr geringer Unterschied sein aber Sicher ist Sicher.
TMC 2209
TMC 2208
TMC 2225
A4988
Bei mir ist die Farbreihenfolge, verbaut sind TMC 2208 Treiber
17HS4023
(1/A)Blau - (3/B)Grün - (4/C)Rot - (6/D)Schwarz
STEPPERONLINE Runden Nema 14 Bipolar 0.9deg 7Ncm 0.5A
14HR05-0504S
Schwarz – Grün – Rot – Blau
LDO Nema14 Schrittmotor für orbiter sherpa extruder Nema 14 Motor
LDO-36STH20-1004AHG
Rot – Grün – Gelb – Blau
17Hs08-1004S
Schwarz – Grün – Rot - Blau
Fehlt da noch was oder habe ich einen groben Fehler drin?
Ich hoffe das hilft einigen weiter.




")