- Mitglied seit
- 12.09.2007
- Beiträge
- 8.278
Also ich finde keinen Fehler... Hab am SB nochmal alles nachgezogen. Belt-Spannung neu eingestellt. Drucker auf den Fliesenboden gestellt. Die Panels etc. soweit möglich abgemacht... Das ändert alles nicht viel.
An dieser Stelle möchten wir Ihnen ein Youtube-Video zeigen. Ihre Daten zu schützen, liegt uns aber am Herzen: Youtube setzt durch das Einbinden und Abspielen Cookies auf ihrem Rechner, mit welchen sie eventuell getracked werden können. Wenn Sie dies zulassen möchten, klicken Sie einfach auf den Play-Button. Das Video wird anschließend geladen und danach abgespielt.
Youtube Videos ab jetzt direkt anzeigen
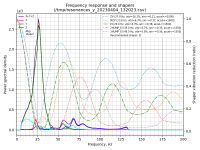
Laut dem Video bei ~22:20 sollte der Peak von X größer sein als bei Y. Sonst hat man ein "Over-Dampening" Issue auf der X-Achse. Nur was tut man dann oder was verursacht das?  Vorher hatte ich einen X-Achsen Peak bei knapp 9 und 10k Accel MVZ... Jetzt geht die Skala nur noch bis 1.6.
Vorher hatte ich einen X-Achsen Peak bei knapp 9 und 10k Accel MVZ... Jetzt geht die Skala nur noch bis 1.6.

Datenschutzhinweis für Youtube
An dieser Stelle möchten wir Ihnen ein Youtube-Video zeigen. Ihre Daten zu schützen, liegt uns aber am Herzen: Youtube setzt durch das Einbinden und Abspielen Cookies auf ihrem Rechner, mit welchen sie eventuell getracked werden können. Wenn Sie dies zulassen möchten, klicken Sie einfach auf den Play-Button. Das Video wird anschließend geladen und danach abgespielt.
Youtube Videos ab jetzt direkt anzeigen
Vorher hatte ich einen X-Achsen Peak bei knapp 9 und 10k Accel MVZ... Jetzt geht die Skala nur noch bis 1.6.")

")